Nội dung toàn văn Tiêu chuẩn quốc gia TCVN 6396-50:2017 (EN 81-50:2014) về Yêu cầu an toàn về cấu tạo và lắp đặt thang máy - Kiểm tra và thử nghiệm - Phần 50: Yêu cầu về thiết kế, tính toán, kiểm tra và thử nghiệm các bộ phận thang máy
TIÊU CHUẨN QUỐC GIA
TCVN 6396-50:2017
EN 81-50:2014
YÊU CẦU AN TOÀN VỀ CẤU TẠO VÀ LẮP ĐẶT THANG MÁY - KIỂM TRA VÀ THỬ NGHIỆM - PHẦN 50: YÊU CẦU VỀ THIẾT KẾ, TÍNH TOÁN, KIỂM TRA VÀ THỬ NGHIỆM CÁC BỘ PHẬN THANG MÁY
Safety rules for the construction and installation of lifts - Examinations and tests - Part 50: Design rules, calculations, examinations and tests of lift components
Lời nói đầu
TCVN 6396-50:2017 và TCVN 6396-20:2017 thay thế TCVN 6395:2008 và TCVN 6396-2:2009.
TCVN 6396-50:2017 hoàn toàn tương đương với EN 81-50:2014.
TCVN 6396-50:2017 do Ban kỹ thuật tiêu chuẩn quốc gia TCVN/TC 178 Thang máy, thang cuốn và băng tải chở người biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học và Công nghệ công bố.
Bộ TCVN 6396 (EN 81), Yêu cầu an toàn về cấu tạo và lắp đặt thang máy, gồm các phần sau:
- TCVN 6396-3:2010 (EN 81-3:2000), Phần 3: Thang máy chở hàng dẫn động điện và thủy lực.
- TCVN 6396-20:2017 (EN 81-20:2014), Phần 20: Thang máy chở người và thang máy chở người và hàng.
- TCVN 6396-21:2015 (EN 81-21:2009/Amd 1:2012), Phần 21: Thang máy mới chở người, thang máy mới chở người và hàng trong các toà nhà đang sử dụng.
- TCVN 6396-28:2013 (EN 81-28:2003), Phần 28: Báo động từ xa trên thang máy chở người và thang máy chở người và hàng.
- TCVN 6396-50:2017 (EN 81-50:2014), Phần 50: Yêu cầu về thiết kế, tính toán, kiểm tra và thử nghiệm các bộ phận thang máy.
- TCVN 6396-58:2010 (EN 81-58:2003), Phần 58: Thử tính chịu lửa của cửa tầng
- TCVN 6396-70:2013 (EN 81-70:2003), Phần 70: Khả năng tiếp cận thang máy của người kể cả người khuyết tật.
- TCVN 6396-71:2013 (EN 81-71:2005/Amd 1:2006), Phần 71: Thang máy chống phá hoại khi sử dụng.
- TCVN 6396-72:2010 (EN 81-72:2003), Phần 72: Thang máy chữa cháy.
- TCVN 6396-73:2010 (EN 81-73:2005), Phần 73: Trạng thái của thang máy trong trường hợp có cháy.
- TCVN 6396-77:2015 (EN 81-77:2013), Phần 77: Áp dụng đối với thang máy chở người, thang máy chở người và hàng trong điều kiện động đất.
- TCVN 6396-80:2013 (EN 81-80:2003), Phần 80: Yêu cầu về cải tiến an toàn cho thang máy chở người và thang máy chở người và hàng.
- TCVN 6396-82:2015 (EN 81-82:2013), Phần 82: Yêu cầu nâng cao khả năng tiếp cận thang máy chở người đang sử dụng bao gồm cả người khuyết tật.
Bộ EN 81, Safety rules for the construction and installation of lifts, còn các phần sau:
- EN 81-31:2010, Part 31: Accessible goods only lifts.
- EN 81-40:2008, Part 40: Stairlifts and inclined lifting platforms intended for persons with impaired mobility.
- EN 81-41:2010, Part 41, Vertical lifting platforms intended for use by persons with impaired mobility.
- EN 81-43:2009, Part 43: Lifts for cranes.
Lời giới thiệu
Tiêu chuẩn này quy định các yêu cầu an toàn liên quan đến thang máy chở người và thang máy chở người và hàng để bảo vệ người và hàng tránh các nguy cơ tai nạn liên quan đến quá trình sử dụng bình thường, hoạt động bảo trì và cứu hộ của thang máy.
YÊU CẦU AN TOÀN VỀ CẤU TẠO VÀ LẮP ĐẶT THANG MÁY - KIỂM TRA VÀ THỬ NGHIỆM - PHẦN 50: YÊU CẦU VỀ THIẾT KẾ, TÍNH TOÁN, KIỂM TRA VÀ THỬ NGHIỆM CÁC BỘ PHẬN THANG MÁY
Safety rules for the construction and installation of lifts - Examinations and tests - Part 50: Design rules, calculations, examinations and tests of lift components
1 Phạm vi áp dụng
Tiêu chuẩn này quy định các yêu cầu về thiết kế, tính toán, kiểm tra và thử nghiệm các bộ phận của thang máy được đề cập đến trong tiêu chuẩn khác dùng cho việc thiết kế thang máy chở người và hàng, thang máy chở hàng, và các loại thiết bị nâng tương tự.
2 Tài liệu viện dẫn
Các tài liệu viện dẫn sau rất cần thiết cho việc áp dụng tiêu chuẩn này. Đối với các tài liệu viện dẫn ghi năm công bố thì áp dụng phiên bản được nêu. Đối với các tài liệu viện dẫn không ghi năm công bố thì áp dụng phiên bản mới nhất, bao gồm cả các sửa đổi, bổ sung (nếu có).
TCVN 6396-20:2017 (EN 81-20:2014), Yêu cầu an toàn về cấu tạo và lắp đặt thang máy - Thang máy chở người và hàng - Phần 20: Thang máy chở người và thang máy chở người và hàng.
TCVN 6592-4-1:2009 (IEC 60947-4-1:2002): Thiết bị đóng cắt và điều khiển hạ áp - Phần 4-1: Công tắc tơ và bộ khởi động động cơ - Công tắc tơ và bộ khởi động động cơ kiểu điện - cơ.
TCVN 7699-2-6 (IEC 60068-2-6), Thử nghiệm môi trường - Phần 2-6: Các Thử nghiệm - Thử nghiệm Fc: Rung (Hình sin).
TCVN 7699-2-14 (IEC 60068-2-14), Thử nghiệm môi trường - Phần 2-14: Các thử nghiệm - Thử nghiệm N - Thay đổi nhiệt độ.
TCVN 7699-2-27 (IEC 60068-2-27), Thử nghiệm môi trường - Phần 2-27: Các thử nghiệm - Thử nghiệm Ea và Hướng dẫn: Sốc.
TCVN 10884-1 (EN 60664-1), Phối hợp cách điện dùng cho thiết bị trong hệ thống hạ áp - Phần 1: Nguyên tắc, yêu cầu và thử nghiệm.
ISO 12100:20101), Safety of machinery - General principles for design - Risk assessment and risk reduction (An toàn máy - Nguyên lý chung cho thiết kế - Đánh giá rủi ro và giảm rủi ro).
EN 10025 (tất cả các phần), Hot rolled products of non-alloy structural steels - Technical delivery conditions (Các sản phẩm thép kết cấu cuộn cán nóng phi hợp kim - Điều kiện kỹ thuật khi cung cấp).
EN 12385-5, Steel wire ropes - Safety - Part 5: Stranded ropes for lifts (Cáp thép - An toàn - Phần 5: Cáp bện cho thang máy).
EN 60112, Method for the determination of the proof and the comparative tracking Indices of solid insulating materials (IEC 60112)(Phương pháp xác định chỉ số phóng điện bề mặt (PTI) và chỉ số phóng điện tương đối (CTI) của vật liệu cách điện rắn (IEC 60112)).
EN 60947-5-1, Low-voltage switchgear and controlgear- Part 5-1: Control circuit devices and switching elements - Electromechanical control circuit devices (IEC 60947-5-1) (Cơ cấu chuyển mạch và cơ cấu điều khiển điện áp thấp - Phần 5-1: Thiết bị điều khiển mạch và thành phần chuyển mạch - Thiết bị điều khiển mạch kiểu điện cơ (IEC 60947-5-1)).
EN 61508-1:2010, Functional safety of electrical/electronic/programmable electronic safety-related systems Part 1: General requirements (IEC 61508-1:2010) (An toàn về vận hành của các hệ thống điện/điện tử/điện tử lập trình liên quan đến an toàn - Phần 1: Yêu cầu chung (IEC 61508-1:2010))
EN 61508-2:2010, Functional safety of electrical/electronic/programmable electronic safety-related systems Part 2: Requirements for electrical/electronic/programmable electronic safety-related systems (IEC 61508-2:2010) (An toàn về vận hành của câc hệ thống điện/điện tử/điện tử lập trình liên quan đến an toàn - Phần 2: Yêu cầu đối với hệ thống an toàn liên quan đến điện/điện tử/điện tử lập trình (IEC 61508-2:2010))
EN 61508-3:2010, Functional safety of electrical/electronic/programmable electronic safety related systems Part 3: Software requirements (IEC 61508-3:2010) (An toàn về vận hành của các hệ thống điện/điện tử/điện tử lập trình liên quan đến an toàn - Phần 3: Yêu cầu đối với phần mềm (IEC 61508-3:2010))
EN 61508-7:2010, Functional safety of electrical/electronic/programmable electronic safety related systems Part 7: Overview of techniques and measures (IEC 61508-7:2010) (An toàn về vận hành của các hệ thống điện/điện tử/điện tử lập trình liên quan đến an toàn - Phần 7: Mô tả tóm tắt về kỹ thuật và các phép đo (IEC 61508-7:2010)).
3 Thuật ngữ và định nghĩa
Tiêu chuẩn này sử dụng các thuật ngữ và định nghĩa dưới đây.
3.1
Tổ chức được phê duyệt (approved body)
Tổ chức hoặc nhà sản xuất sử dụng một hệ thống đảm bảo chất lượng đầy đủ đã được phê duyệt để thực hiện việc kiểm tra, thử nghiệm các bộ phận an toàn.
3.2
Bộ phận an toàn (safety component)
Bộ phận được cung cấp2) để đáp ứng một chức năng an toàn nào đó khi được sử dụng.
3.3
Giấy chứng nhận thử nghiệm mẫu (type examination certificate)
Tài liệu được cấp bởi một tổ chức được phê duyệt sau khi thực hiện thử nghiệm mẫu, qua đó xác nhận rằng mẫu sản phẩm cần xem xét tuân thủ theo những điều khoản áp dụng cho sản phẩm này.
4 Danh mục các mối nguy hiểm đáng kể
Điều này liệt kê tất cả các mối nguy hiểm đáng kể, những sự kiện và tình huống nguy hiểm phải được xem xét trong tiêu chuẩn này. Qua quá trình đánh giá rủi ro, các nguy hiểm trên được xác định là đáng kể đối với loại máy này và phải có biện pháp để loại trừ hoặc giảm rủi ro (xem Bảng 1).
Bảng 1 - Danh sách các mối nguy hiểm đáng kể
|
Số |
Các nguy hiểm liệt kê trong Phụ lục B của ISO 12100:2010 |
Các điều tương ứng |
|
1 |
Nguy hiểm về cơ khí do: |
|
|
Quá trình tăng tốc, giảm tốc (động năng) |
5.3; 5.4; 5.5; 5.7; 5.8; 5.9 |
|
|
Một bộ phận chuyển động tiến về một bộ phận cố định |
5.2 |
|
|
|
Các bộ phận đàn hồi |
5.10; 5.11; 5.12; 5.13 |
|
Đồ vật rơi |
5.3; 5.4; 5.5; 5.9 |
|
|
Lực hấp dẫn (thế năng) |
5.3; 5.4; 5.5; 5.9 |
|
|
Ở trên cao |
5.3; 5.4; 5.5; 5.9 |
|
|
Áp suất cao |
5.13 |
|
|
Các bộ phận chuyển động |
5.2; 5.3; 5.4; 5.5; 5.6; 5.7; 5.8; 5.9; 5.10; 5.11; 5.12; 5.13; 5.14; 5.15; 5.16 |
|
|
Các bộ phận quay |
5.4; 5.11; 5.12 |
|
|
Độ ổn định |
5.10; 5.11; 5.12; 5.13; 5.14 |
|
|
Độ bền |
5.10; 5.11; 5.12; 5.13; 5.14 |
|
|
2 |
Nguy hiểm về điện |
|
|
Hồ quang điện |
5,2; 5.4; 5.6; 5.7; 5.8; 5.15; 5.16 |
|
|
Hiện tượng tĩnh điện |
5,2; 5.4; 5.6; 5.7; 5.8; 5.15; 5.16 |
|
|
Các bộ phận dẫn điện |
5,2; 5.4; 5.6; 5.7; 5.8; 5.15; 5.16 |
|
|
Khoảng cách đến các phần dẫn điện cao thế chưa đủ xa |
5,2; 5.4; 5.6; 5.7; 5.8; 5.15; 5.16 |
|
|
Quá tải |
5,2; 5.4; 5.6; 5.7; 5.8; 5.15; 5.16 |
|
|
Các bộ phận trở nên dẫn điện do bị lỗi |
5,2; 5.4; 5.6; 5.7; 5.8; 5.15; 5.16 |
|
|
Ngắn mạch |
5,2; 5.4; 5.6; 5.7; 5.8; 5.15; 5.16 |
|
|
6 |
Nguy hiểm do bức xạ |
|
|
Bức xạ điện từ tầng số thấp |
5.6; 5.15; 5.16 |
|
|
Bức xạ điện từ tầng số vô tuyến |
5.6; 5.15; 5.16 |
|
|
9 |
Nguy hiểm liên quan đến môi trường hoạt động của thiết bị |
5.2; 5.3; 5.4; 5.5; 5.6; 5.7; 5.8; 5.9; 5.10; 5.11; 5.12; 5.13; 5.14; 5.15; 5.16 |
5 Yêu cầu về thiết kế, tính toán, kiểm tra và thử nghiệm
5.1 Yêu cầu chung đối với thử nghiệm mẫu các thiết bị an toàn
5.1.1 Mục tiêu và phạm vi thử nghiệm
Bộ phận/thiết bị an toàn phải trải qua quy trình thử nghiệm để xác nhận rằng, trong phạm vi yêu cầu về cấu tạo và hoạt động, chúng tuân theo những yêu cầu của tiêu chuẩn này. Các bộ phận/thiết bị này cần phải được kiểm tra một cách cụ thể để đảm bảo các phần cơ, điện và điện tử được đánh giá một cách phù hợp và trong quá trình hoạt động, tính năng của thiết bị không bị mất, đặc biệt là qua quá trình mài mòn hay già hoá. Nếu bộ phận an toàn phải đáp ứng các yêu cầu đặc thù, như chống thấm, chống bụi hoặc có cấu tạo chống cháy nổ, thì cần phải có thêm quá trình kiểm tra và/hoặc thử nghiệm với những tiêu chí phù hợp.
5.1.2 Yêu cầu chung
5.1.2.1 Tiêu chuẩn này giả định đơn vị thử nghiệm sẽ đảm nhận cả việc thử nghiệm và chứng nhận. Tổ chức được phê duyệt có thể thuộc một nhà sản xuất có hệ thống đảm bảo chất lượng đầy đủ đã được phê duyệt. Trong những trường hợp nhất định, đơn vị thử nghiệm và tổ chức cấp giấy chứng nhận thử nghiệm mẫu có thể khác nhau. Trong những trường hợp này, các thủ tục hành chính có thể khác với quy định trong tiêu chuẩn này.
5.1.2.2 Quá trình thử nghiệm mẫu phải được thực hiện bởi nhà sản xuất thiết bị hoặc đại diện được ủy quyền của họ và tiến hành tại đơn vị thử nghiệm đã được công nhận.
5.1.2.3 Việc gửi mẫu thử nghiệm phải được sự thống nhất giữa đơn vị thử nghiệm và bên yêu cầu thử nghiệm.
5.1.2.4 Bên yêu cầu thử nghiệm có thể tham dự các thử nghiệm.
5.1.2.5 Nếu đơn vị thử nghiệm được giao toàn bộ việc thử nghiệm cho một thiết bị yêu cầu phải có chứng nhận thử mẫu mà không có đủ các phương tiện cần thiết để thực hiện việc thử nghiệm hoặc kiểm tra cụ thể nào đó, họ có nhiệm vụ thực hiện các công việc này ở các đơn vị thử nghiệm khác sau khi có sự đồng ý của bên yêu cầu thử nghiệm.
5.1.2.6 Độ chính xác của các dụng cụ đo cho phép thực hiện các phép đo có độ sai lệch như sau, trừ khi có yêu cầu cụ thể khác:
a) ± 1 % đối với khối lượng, lực, khoảng cách, tốc độ;
b) ± 2 % đối với gia tốc, gia tốc hãm;
c) ± 5 % đối với điện áp, dòng điện;
d) ± 5 % đối với nhiệt độ;
e) thiết bị ghi nhận số liệu phải có khả năng phát hiện các tín hiệu thay đổi trong khoảng thời gian 0,01 s;
f) ± 2,5 % đối với lưu lượng;
g) ± 1 % đối với áp suất P ≤ 200 kPa;
h) ± 5 % đối với áp suất P > 200 kPa.
5.2 Thử nghiệm mẫu thiết bị khóa cửa cabin và cửa tầng
5.2.1 Yêu cầu chung
5.2.1.1 Phạm vi áp dụng
Các quy trình này áp dụng cho thiết bị khóa cửa cabin và cửa tầng. Thiết bị khóa được hiểu là bao gồm các bộ phận tham gia vào việc khóa cửa và kiểm tra trạng thái khóa của cửa.
5.2.1.2 Hồ sơ phải đệ trình
5.2.1.2.1 Bản vẽ sơ đồ mạch mô tả hoạt động
Bản vẽ này phải chỉ rõ tất cả các chi tiết liên quan đến hoạt động và đặc tính an toàn của thiết bị khóa cửa, bao gồm:
a) hoạt động của thiết bị trong điều kiện làm việc bình thường, cho thấy chức năng cài khớp hiệu quả của thiết bị khóa cửa và vị trí tại đó thiết bị an toàn điện hoạt động;
b) hoạt động của thiết bị kiểm tra về mặt cơ khí của vị trí khóa, nếu có;
c) việc điều khiển và hoạt động của thiết bị mở khóa khẩn cấp;
d) loại nguồn điện (một chiều hoặc xoay chiều), điện áp danh định và dòng danh định.
5.2.1.2.2 Bản vẽ lắp ráp với chú thích
Bản vẽ này phải thể hiện tất cả các chi tiết quan trọng đối với hoạt động của thiết bị khóa cửa, đặc biệt là những chi tiết cần tuân thủ các yêu cầu của tiêu chuẩn này. Các chú thích phải thể hiện theo danh sách các phần chính, loại vật liệu sử dụng, và đặc tính của các chi tiết liên kết.
5.2.1.3 Mẫu thử
Phải nộp một bộ khóa cửa cho đơn vị thử nghiệm.
Nếu thử nghiệm được tiến hành trên mẫu sản xuất thử thì sau đó nó phải được lặp lại trên mẫu sản phẩm thực tế.
Nếu việc thử nghiệm chỉ có thể tiến hành khi thiết bị đã được lắp vào cửa tương ứng thì thiết bị phải được lắp trên cửa hoàn chỉnh trong tình trạng hoạt động tốt. Tuy nhiên kích thước cửa thử nghiệm có thể giảm đi so với mẫu sản phẩm thực tế, với điều kiện không làm sai lệch kết quả thử nghiệm.
5.2.2 Kiểm tra và thử nghiệm
5.2.2.1 Kiểm tra việc vận hành
Việc kiểm tra nhằm mục đích thử nghiệm xem các bộ phận cơ khí và điện của thiết bị khóa cửa có hoạt động đúng về mặt an toàn, và có tuân thủ các yêu cầu của tiêu chuẩn này, cũng như tiêu chuẩn yêu cầu phải có thiết bị khóa cửa và kiểm tra xem thiết bị có tuân thủ với các yêu cầu đặc biệt không.
Cụ thể, phải thử nghiệm các nội dung sau:
a) các chi tiết khóa phải gài sâu ít nhất 7 mm trước khi thiết bị an toàn điện hoạt động;
b) trong hoạt động bình thường phải loại trừ trường hợp một người nào đó từ những vị trí dễ tiếp cận và chỉ với một thao tác có thể khiến thang máy hoạt động khi cửa đang mở hoặc không khóa.
5.2.2.2 Thử nghiệm cơ khí
5.2.2.2.1 Yêu cầu chung
Việc thử nghiệm này nhằm kiểm tra độ bền của các bộ phận khóa bằng cơ khí và điện trong thiết bị khóa cửa.
Mẫu thiết bị khóa ở vị trí hoạt động bình thường phải được điều khiển bởi thiết bị vẫn thường dùng để vận hành chúng.
Mẫu phải được bôi trơn theo đúng yêu cầu của nhà sản xuất thiết bị.
Khi có nhiều phương tiện khả thi để điều khiển và có nhiều vị trí hoạt động, việc thử nghiệm độ bền phải được thực hiện cho trường hợp bất lợi nhất khi xét về lực tác động lên các bộ phận của thiết bị.
Số lượng chu kỳ hoàn chỉnh của quá trình vận hành và hành trình của các bộ phận trong thiết bị khóa phải được ghi lại bằng các bộ đếm cơ hoặc điện.
5.2.2.2.2 Thử nghiệm độ bền
Thiết bị khóa phải chịu được 1 000 000 (± 1 %) chu kỳ hoàn chỉnh; một chu kỳ gồm chuyển động khóa, mở với hành trình hoàn chỉnh nhất có thể có theo cả hai chiều.
Chuyển động của thiết bị phải êm, không giật, và với mức 60 (± 10 %) chu kỳ trong một phút.
Trong quá trình thử nghiệm độ bền, các tiếp điểm điện của khóa phải đóng mạch trở kháng ứng với điện áp danh định và dòng gấp hai lần dòng danh định.
Nếu thiết bị khóa được trang bị thiết bị kiểm tra cơ khí để kiểm soát chốt khóa hoặc vị trí của móc khóa thì thiết bị này phải chịu được thử nghiệm độ bền với 100 000 (± 1 %) chu kỳ.
Chuyển động của thiết bị phải êm, không giật, và với mức 60 (± 10 %) chu kỳ trong một phút.
5.2.2.2.3 Thử nghiệm tĩnh
Với các thiết bị khóa cửa trang bị cho cửa bản lề, việc thử nghiệm được thực hiện trong khoảng thời gian 300 s dưới tác dụng của lực tăng dần đến khi đạt độ lớn 3000 N.
Lực này phải đặt theo chiều mở cửa và tại vị trí xa nhất có thể tương ứng với khi người dùng cố gắng mở cửa. Lực có độ lớn 1000 N được sử dụng khi thử với thiết bị khóa trang bị cho cửa trượt.
5.2.2.2.4 Thử nghiệm động
Thiết bị khóa, khi đang ở trạng thái khóa, sẽ được thử nghiệm va đập tác động theo chiều mở cửa.
Sự va đập tương ứng với lực tác động do vật rắn nặng 4 kg rơi tự do từ độ cao 0,50 m.
5.2.2.3 Các tiêu chí đánh giá cho thử nghiệm cơ khí
Sau thử nghiệm độ bền (5.2.2.2.2), thử nghiệm tĩnh (5.2.2.2.3) và thử nghiệm động (5.2.2.2.4), thiết bị phải không bị mòn, biến dạng hoặc gãy, vốn là những yếu tố có thể ảnh hưởng bất lợi đến độ an toàn.
5.2.2.4 Thử nghiệm về điện
5.2.2.4.1 Thử nghiệm độ bền của tiếp điểm
Thử nghiệm này được bao gồm trong phần thử nghiệm độ bền trình bày trong 5.2.2.2.2.
5.2.2.4.2 Thử nghiệm khả năng ngắt mạch
5.2.2.4.2.1 Yêu cầu chung
Thử nghiệm này được thực hiện sau khi thực hiện thử nghiệm về độ bền. Thử nghiệm sẽ kiểm tra xem khả năng ngắt mạch có hoạt động tốt không. Thử nghiệm này phải tuân thủ theo quy trình nêu trong TCVN 6592-4-1 (EN 60947-4-1) và EN 60947-5-1, giá trị của dòng điện và điện áp danh định làm cơ sở cho thử nghiệm là các giá trị được quy định bởi nhà sản xuất thiết bị.
Nếu không có quy định khác, giá trị danh định lấy như sau:
a) dòng xoay chiều: 230 V, 2 A;
b) dòng một chiều: 200 V, 2 A;
Nếu không có yêu cầu ngược lại, khả năng ngắt mạch được kiểm tra cho cả dòng xoay chiều và một chiều.
Thử nghiệm được tiến hành với thiết bị khóa đang ở trạng thái hoạt động. Nếu nhiều trạng thái đều được phép thì việc thử nghiệm được tiến hành cho trạng thái bất lợi nhất.
Mẫu thử được cung cấp bao gồm cả vỏ và được đi dây như khi chúng được sử dụng bình thường.
5.2.2.4.2.2 Các thiết bị khóa sử dụng điện xoay chiều phải mở và đóng mạch điện có điện áp bằng 110 % điện áp danh định trong 50 lần, với tốc độ bình thường, và trong khoảng thời gian 5 s đến 10 s. Tiếp điểm phải được giữ ở trạng thái đóng trong ít nhất 0,5 s.
Mạch điện phải có cuộn cảm và điện trở mắc nối tiếp. Hệ số công suất phải đạt 0,7 ± 0,05 và dòng thử nghiệm bằng 11 lần so với dòng danh định do nhà sản xuất thiết bị chỉ định.
5.2.2.4.2.3 Các thiết bị khóa sử dụng điện một chiều phải mở và đóng mạch điện có điện áp bằng 110 % điện áp danh định trong 20 lần, với tốc độ bình thường, và trong khoảng thời gian 5 s đến 10 s. Các công tắc phải được giữ ở trạng thái đóng trong ít nhất 0,5 s.
Mạch điện phải có cuộn cảm và điện trở mắc nối tiếp với giá trị sao cho dòng điện đạt 95 % giá trị ổn định của dòng điện thử nghiệm trong thời gian 300 ms.
Dòng điện thử nghiệm có giá trị bằng 110 % so với dòng danh định do nhà sản xuất thiết bị quy định.
5.2.2.4.2.4 Thử nghiệm được xem như đạt yêu cầu nếu không gây ra hiện tượng phóng điện hoặc hồ quang điện và không xuất hiện các hư hỏng làm ảnh hưởng đến sự an toàn.
5.2.2.4.3 Thử nghiệm khả năng chống rò điện
Thử nghiệm này phải tuân thủ theo quy trình nêu trong EN 60112. Các cực điện phải nối với nguồn xoay chiều hình sin 175 V, 50 Hz.
5.2.2.4.4 Kiểm tra khe hở và khoảng cách phóng điện.
Khe hở và khoảng cách phóng điện phải tuân thủ theo các yêu cầu trong các tiêu chuẩn có yêu cầu sử dụng tiêu chuẩn này, ví dụ TCVN 6396-20 (EN 81-20), 5.11.2.2.4.
5.2.2.4.5 Kiểm tra các yêu cầu dành riêng cho công tắc an toàn và cách tiếp cận chúng.
Việc kiểm tra cần lưu ý tới vị trí lắp đặt và sự bố trí phù hợp của thiết bị khóa.
5.2.3 Thử nghiệm riêng đối với một số loại thiết bị khóa cửa
5.2.3.1 Thiết bị khóa cho cửa lùa nhiều cánh theo chiều ngang hoặc đứng
Theo yêu cầu trong các tiêu chuẩn có yêu cầu sử dụng tiêu chuẩn này, các thiết bị tạo liên kết cơ trực tiếp giữa các tấm cánh cửa, ví dụ TCVN 6396-20 (EN 81-20), 5.3.14.1 hoặc gián tiếp, ví dụ TCVN 6396-20 (EN 81-20, 5.3.14.2 được coi là bộ phận của thiết bị khóa.
Các thiết bị này phải qua quá trình thử nghiệm ở 5.2.2. Số chu kỳ trong mỗi phút khi thử nghiệm về độ bền phải phù hợp với kích thước kết cấu.
5.2.3.2 Khóa sập cho cửa bản lề
Nếu các khóa này có trang bị thiết bị an toàn điện thì phải kiểm tra sự biến dạng có thể xảy ra của chốt khóa và nếu sau thử nghiệm tĩnh ở 5.2.2.2.3 xuất hiện bất cứ nghi ngờ nào về độ bền của thiết bị thì tải trọng phải tăng dần cho đến khi thiết bị an toàn bắt đầu mở. Các bộ phận của thiết bị khóa và của cửa phải không bị hư hỏng hoặc biến dạng dư khi chịu tải trọng tác động.
Nếu sau thử nghiệm tĩnh không còn nghi ngờ gì về thay đổi kích thước và kết cấu, cũng như độ bền thì không phải tiến hành thử về độ bền của chốt khóa.
5.2.4 Giấy chứng nhận thử nghiệm mẫu
Giấy chứng nhận phải chỉ rõ các nội dung sau:
a) các thông tin theo Phụ lục A;
b) loại và ứng dụng của thiết bị khóa;
c) loại nguồn (xoay chiều và/hoặc một chiều), các giá trị của điện áp danh định và dòng danh định;
d) trong trường hợp khóa sập: lực cần thiết tác động lên thiết bị an toàn điện để kiểm tra sự biến dạng đàn hồi của chốt khóa.
5.3 Thử nghiệm mẫu bộ hãm an toàn
5.3.1 Yêu cầu chung
Bên yêu cầu thử nghiệm phải trình bày rõ phạm vi sử dụng của thiết bị, ví dụ như:
- khối lượng nhỏ nhất, lớn nhất;
- tốc độ định mức lớn nhất và tốc độ kích hoạt lớn nhất.
Cần chỉ rõ các thông tin chi tiết về vật liệu sử dụng, loại ray dẫn hướng và phương pháp gia công bề mặt ray (như kéo, phay, cán).
Các tài liệu sau phải được kèm theo hồ sơ đề nghị cấp giấy chứng nhận:
a) bản vẽ lắp ráp và bản vẽ chi tiết thể hiện kết cấu, nguyên lý hoạt động, vật liệu sử dụng, kích thước và dung sai của các bộ phận;
b) trường hợp bộ hãm an toàn êm, bổ sung thêm biểu đồ tài liên quan đến các phần tử đàn hồi.
5.3.2 Bộ hãm tức thời
5.3.2.1 Các mẫu thử
Phải cung cấp cho cơ sở thử nghiệm hai bộ hãm với nêm hoặc kẹp vá hai mẫu thanh ray.
Việc lắp đặt và các chi tiết kết nối cho mẫu thử được xác định bởi đơn vị thử nghiệm tương ứng với những thiết bị được họ sử dụng.
Nếu bộ hãm có thể được dùng với các loại ray dẫn hướng khác nhau, các thử nghiệm mới không cần tiến hành nếu độ dầy của thanh ray, chiều rộng chi tiết hãm sử dụng cho bộ hãm an toàn và biện pháp gia công bề mặt (như kéo, phay, cán) là như nhau.
5.3.2.2 Thử nghiệm
5.3.2.2.1 Phương pháp thử nghiệm
Thử nghiệm được thực hiện trên máy ép hoặc thiết bị tương tự, và không có sự thay đổi đột ngột về tốc độ khi những thiết bị này chuyển động. Các số liệu cần đo kiểm:
a) quãng đường phanh như là một hàm của lực;
b) biến dạng của thân bộ hãm an toàn như là hàm của lực hoặc của quãng đường phanh.
5.3.2.2.2 Quy trình thử nghiệm
Ray dẫn hướng chuyển động xuyên qua bộ hãm an toàn.
Đánh dấu vào thân bộ hãm an toàn để có thể đo được biến dạng của nó.
Quãng đường phanh được ghi nhận lại như là hãm của lực.
Sau khi thử:
a) độ cứng của thân và các chi tiết hãm được so sánh với số liệu gốc cung cấp bởi bên yêu cầu thử nghiệm. Đối với những trường hợp đặc biệt, các phân tích khác có thể được thực hiện;
b) nếu không bị gãy, sẽ kiểm tra độ biến dạng hoặc các thay đổi khác (ví dụ nứt, biến dạng hoặc mòn của các chi tiết hãm, bề mặt ma sát);
c) nếu cần thiết, chụp ảnh thân bộ hãm, các chi tiết hãm và ray dẫn hướng để làm bằng chứng cho sự biến dạng hoặc nứt gãy.
5.3.2.2.3 Hồ sơ
5.3.2.2.3.1 Cần xây dựng hai đồ thị như sau
a) đồ thị thứ nhất thể hiện quãng đường phanh như là một hàm của lực;
b) đồ thị còn lại thể hiện độ biến dạng của thân bộ hãm an toàn. Nó phải được thể hiện tương ứng với đồ thị thứ nhất.
5.3.2.2.3.2 Khả năng tải của bộ hãm an toàn được tính bằng cách lấy tích phân phần diện tích của đồ thị quãng đường-lực
Phần diện tích đồ thị được chọn để tính như sau:
a) toàn vùng nếu không xuất hiện biến dạng dư;
b) nếu xuất hiện biến dạng dư hoặc nứt gãy thì chọn:
1) giá trị diện tích vùng đồ thị mà tại đó đạt đến giới hạn đàn hồi, hoặc
2) giá trị diện tích vùng đồ thị tương ứng với lực cực đại.
5.3.2.3 Xác định khối lượng cho phép
5.3.2.3.1 Năng lượng hấp thụ bởi bộ hãm an toàn
Sử dụng quãng đường rơi tự do được tính toán trong mối liên hệ với tốc độ kích hoạt cực đại của bộ khống chế vượt tốc, được quy định qua các yêu cầu trong các tiêu chuẩn có yêu cầu áp dụng tiêu chuẩn này (ví dụ TCVN 6396-20 (EN 81-20), 5.6.2.2.1.2.
Quãng đường rơi tự do, tính bằng mét, được tính theo công thức:
![]()
trong đó:
gn là gia tốc rơi tự do chuẩn, tính bằng mét trên giây bình phương;
v1 là tốc độ kích hoạt của bộ khống chế vượt tốc, tính bằng mét trên giây;
0,10 m tương ứng với quãng đường phanh trong thời gian đáp ứng;
0,03 m tương ứng với quãng đường phanh để triệt tiêu khe hở giữa má phanh và ray dẫn hướng.
Tổng năng lượng bộ hãm an toàn có thể hấp thụ:
2 • K = (P + Q)1 • gn • h
từ đó: ![]()
trong đó:
K, K1, K2 là năng lượng hấp thụ bởi một thân bộ hãm, tính bằng Jun (tính toán theo đồ thị);
P là khối lượng cabin không tải và các bộ phận hỗ trợ đi kèm, ví dụ như cáp động, cáp/xích (nếu có), tính bằng kilôgam;
Q là tải danh định, tính bằng kilôgam;
(P + Q)1 là khối lượng cho phép, tính bằng kilôgam.
5.3.2.3.2 Khối lượng cho phép
Khối lượng cho phép tính bằng kilôgam;
a) Nếu không vượt mức giới hạn đàn hồi:
![]()
K được tính toán bằng cách lấy tích phân vùng đồ thị xác định ở 5.3.2.2.3.2 a);
2 được sử dụng như hệ số an toàn.
b) Nếu vượt mức giới hạn đàn hồi, có hai cách tính và có thể chọn khối lượng cho phép nào cao hơn:
1) ![]()
K1 được tính bằng cách lấy tích phân đồ thị xác định ở 5.3.2.2.3.2 b) 1);
2 được sử dụng như hệ số an toàn;
2) ![]()
K2 được tính bằng cách lấy tích phân đồ thị xác định ở 5.3.2.2.3.2 b) 2);
3,5 được sử dụng như hệ số an toàn.
5.3.3 Bộ hãm êm
5.3.3.1 Mô tả và mẫu thử
Bên yêu cầu thử nghiệm phải nêu rõ việc thử nghiệm sẽ được tiến hành với khối lượng bao nhiêu kilôgam và với tốc độ kích hoạt của bộ khống chế vượt tốc bằng bao nhiêu mét trên giây. Nếu bộ hãm an toàn phải thử nghiệm cho nhiều khối lượng khác nhau thì bên yêu cầu thử nghiệm phải chỉ rõ việc điều chỉnh khối lượng diễn ra theo từng giai đoạn hay liên tục.
Bên yêu cầu thử nghiệm có thể chọn cách tính khối lượng treo tính bằng kilôgam bằng cách chia lực phanh dự tính đo bằng Newton cho 16, nhằm ứng với gia tốc hãm trung bình 0,6 gn.
Một bộ hãm an toàn hoàn chỉnh theo như thỏa thuận với đơn vị thử nghiệm, cùng với số lượng má phanh cần thiết cho tất cả các thử nghiệm phải được cung cấp cho đơn vị thử nghiệm sử dụng. Số lượng các bộ má phanh cần cho các cuộc thử nghiệm cũng phải được kèm theo. Ngoài ra còn phải cung cấp các thanh ray dẫn hướng với chiều dài do đơn vị thử nghiệm quy định.
5.3.3.2 Thử nghiệm
5.3.3.2.1 Phương pháp thử
5.3.3.2.1.1 Việc thử nghiệm được thực hiện bằng phương pháp cho rơi tự do. Các thông số phải đo trực tiếp hoặc gián tiếp gồm:
a) tổng chiều dài quãng đường rơi tự do;
b) quãng đường phanh trên ray dẫn hướng;
c) quãng đường trượt của cáp khống chế vượt tốc hoặc thiết bị thay thế;
d) tổng hành trình của các bộ phận bộ lò xo.
Các số liệu đo được ở a) và b) được ghi nhận như là một hàm của thời gian.
5.3.3.2.1.2 Các thông số sau cần xác định:
a) lực phanh trung bình;
b) lực phanh tức thời lớn nhất;
c) lực phanh tức thời nhỏ nhất.
5.3.3.2.2 Quy trình thử nghiệm
5.3.3.2.2.1 Bộ hãm an toàn được thử nghiệm với một mức khối lượng
Đơn vị thử nghiệm sẽ thực hiện bốn lần thử nghiệm với khối lượng (P + Q)1. Giữa các lần thử nghiệm, các bộ phận bị ma sát sẽ được để nguội để trở về nhiệt độ bình thường.
Trong quá trình thử nghiệm có thể sử dụng vài cụm bộ phận bị ma sát giống nhau.
Tuy vậy, mỗi cụm phải có khả năng thực hiện:
a) ba lần thử, nếu tốc độ định mức không vượt quá 4 m/s;
b) hai lần thử, nếu tốc độ vượt quá 4 m/s.
Độ cao rơi tự do cần tính toán để tương ứng với tốc độ kích hoạt lớn nhất của bộ khống chế vượt tốc sử dụng với bộ hãm an toàn này.
Bộ hãm an toàn được kích hoạt bằng một thiết bị cho phép tốc độ kích hoạt được đáp ứng một cách chính xác.
Ví dụ, nếu khi sử dụng cáp, phần dây chùng nên được tính toán cẩn thận, cố định vào ống bọc, ống này có thể chuyển động ma sát với phần cáp thẳng cố định. Lực ma sát cần phải tương tự lực tác động từ bộ khống chế vượt tốc lên cáp nối với bộ hãm an toàn.
5.3.3.2.2.2 Bộ hãm an toàn thử nghiệm với nhiều mức khối lượng khác nhau
Việc hiệu chỉnh diễn ra theo từng giai đoạn hoặc liên tục.
Hai loại thử nghiệm được tiến hành với:
a) khối lượng lớn nhất; và
b) khối lượng nhỏ nhất.
Bên yêu cầu thử nghiệm cần cung cấp công thức, hoặc đồ thị chỉ rõ sự thay đổi của lực phanh phụ thuộc vào các thông số cho trước.
Đơn vị thử nghiệm sẽ dùng phương thức phù hợp (thông qua chuỗi thử nghiệm thứ ba cho các điểm trung gian, nếu không có phương pháp tốt hơn) để thử nghiệm công thức đã cho.
5.3.3.2.3 Xác định lực phanh của bộ hãm an toàn
5.3.3.2.3.1 Bộ hãm an toàn được thử nghiệm với một mức khối lượng
Lực phanh mà bộ hãm an toàn có thể đạt được sau căn chỉnh và ứng với từng loại ray được lấy bằng giá trị trung bình của các giá trị nhận được khi thử nghiệm. Mỗi thử nghiệm được tiến hành trên các phần chưa được sử dụng của thanh ray.
Cần kiểm tra đảm bảo để giá trị trung bình xác định trong quá trình thử nghiệm dao động trong khoảng ± 25 % tương ứng với giá trị lực phanh đã xác định bên trên.
CHÚ THÍCH: Thực nghiệm cho thấy hệ số ma sát có thể giảm đáng kể nếu các thử nghiệm được thực hiện nhiều lần liên tiếp trên cùng một vùng trên đoạn ray. Điều này góp phần vào việc làm biến đổi điều kiện bề mặt trong quá trình vận hành liên tục của bộ hãm an toàn.
Có thể chấp nhận rằng trong quá trình lắp đặt, bộ hãm an toàn có thể có hoạt động không chủ ý tại vị trí chưa sử dụng trên thanh ray dẫn hướng.
Cần chú ý rằng, nếu do ngẫu nhiên lực phanh có thể bị giảm về độ lớn cho đến khi trượt đến đoạn bề mặt thanh ray chưa sử dụng. Do đó độ trượt sẽ lớn hơn so với bình thường.
Đây là lý do cho việc không cho phép có bất kỳ sự điều chỉnh nào khiến cho gia tốc hãm quá nhỏ ngay từ lúc bắt đầu.
5.3.3.2.3.2 Hiệu chỉnh theo từng giai đoạn hoặc liên tục
Việc hiệu chỉnh được thực hiện theo từng giai đoạn hoặc liên tục.
Lực phanh mà bộ hãm an toàn có thể đạt đến được tính toán như trong 5.3.3.2.3.1 ứng với khối lượng lớn nhất và nhỏ nhất.
5.3.3.2.4 Đánh giá sau quá trình thử nghiệm
Các nội dung sau cần được đánh giá sau quá trình thử nghiệm:
a) độ cứng của thân và các chi tiết hãm được so sánh với số liệu gốc cung cấp bởi bên yêu cầu thử nghiệm;
b) biến dạng hoặc các thay đổi khác sẽ được kiểm tra (ví dụ nứt, biến dạng hoặc mòn của các chi tiết hãm, bề mặt ma sát);
c) nếu cần thiết, chụp ảnh bộ hãm an toàn, các chi tiết hãm và ray dẫn hướng để làm bằng chứng cho sự biến dạng hoặc nứt gãy.
5.3.3.3 Tính toán khối lượng cho phép
5.3.3.3.1 Bộ hãm an toàn thử nghiệm với một mức khối lượng
Khối lượng cho phép được tính theo công thức sau:
![]()
trong đó
FB là lực phanh, tính bằng Newton, xác định theo 5.3.3.2.3;
P là khối lượng cabin không tải và các bộ phận đi kèm, ví dụ như cáp động, cáp/xích (nếu có),... tính bằng kilôgam;
Q là tải danh định, tính bằng kilôgam;
(P + Q)1 là khối lượng cho phép, tính bằng kilôgam;
Nếu khối lượng cho phép sau khi tính toán lớn hơn khối lượng thử nghiệm, khối lượng thử nghiệm sẽ được dùng làm khối lượng cho phép miễn là gia tốc hãm trung bình của mỗi lần thử nghiệm không vượt quá 1 gn.
5.3.3.3.2 Bộ hãm an toàn thử nghiệm cho các mức khối lượng khác nhau.
5.3.3.3.2.1 Hiệu chỉnh theo từng giai đoạn
Khối lượng cho phép được tính cho mỗi lần hiệu chỉnh như cho trong 5.3.3.3.1.
5.3.3.3.2.2 Hiệu chỉnh liên tục
Khối lượng cho phép được tính như trong 5.3.3.3.1 cho khối lượng lớn nhất và nhỏ nhất được áp dụng và tương ứng với công thức sử dụng cho các hiệu chỉnh trung gian.
5.3.3.4 Khả năng sửa đổi các hiệu chỉnh
Nếu trong quá trình thử nghiệm, các giá trị nhận được sai lệch quá 20 % so với các giá trị mong muốn của bên yêu cầu thử nghiệm, các thử nghiệm khác có thể được tiến hành với sự đồng ý của bên yêu cầu thử, sau khi đã sửa đổi các hiệu chỉnh nếu cần thiết.
5.3.4 Chú thích
a) Khối lượng áp dụng
Khối lượng áp dụng khi lắp đặt sử dụng cho thang máy không được vượt quá khối lượng cho phép của bộ hãm an toàn tức thời.
Trong trường hợp bộ hãm an toàn loại êm, khối lượng công bố có thể chênh lệch ± 7,5 % so với khối lượng áp dụng như trong 5.3.3.3. Trong những trường hợp này, có thể chấp nhận được nếu quá trình lắp đặt đáp ứng các yêu cầu trong tiêu chuẩn có yêu cầu sử dụng tiêu chuẩn này (ví dụ, TCVN 6396-20 (EN 81-20), 5.6.2.1), bất kể dung sai thông thường về độ dầy của ray dẫn hướng, điều kiện gia công bề mặt,..;
b) Để đánh giá chất lượng các chi tiết hàn, phải tham khảo các tiêu chuẩn về lĩnh vực này;
c) Cần kiểm tra để chắc chắn rằng hành trình có thể có của các chi tiết hãm phải được đáp ứng trong những điều kiện bất lợi nhất (do sự tích lũy của sai số trong sản xuất);
d) Các bộ phận chịu ma sát cần được duy trì một cách phù hợp để chắc chắn rằng chúng luôn sẵn sàng để hoạt động;
e) Trong trường hợp bộ hãm an toàn loại êm, cần kiểm tra để chắc chắn rằng hành trình của các bộ phận giảm chấn đáp ứng đủ.
5.3.5 Giấy chứng nhận thử nghiệm mẫu
Giấy chứng nhận phải chỉ rõ các nội dung sau:
a) các thông tin theo Phụ lục A;
b) chủng loại và ứng dụng của bộ hãm an toàn;
c) giá trị giới hạn của khối lượng cho phép (xem 5.3.4 a);
d) tốc độ kích hoạt của bộ khống chế vượt tốc;
e) loại ray dẫn hướng;
f) độ dày cho phép của bản nối ray dẫn hướng;
g) chiều rộng nhỏ nhất của bộ phận hãm; và riêng đối với bộ hãm an toàn êm:
h) tình trạng gia công bề mặt thanh ray dẫn hướng (như kéo, phay, cán);
i) tình trạng bôi trơn ray. Nếu ray được bôi trơn, chỉ rõ loại và đặc tính của chất bôi trơn.
5.4 Thử nghiệm mẫu bộ khống chế vượt tốc
5.4.1 Yêu cầu chung
Bên yêu cầu thử nghiệm cần chỉ rõ các thông tin sau cho cơ sở thử nghiệm:
a) loại (hoặc các loại) bộ hãm an toàn được vận hành bởi bộ khống chế vượt tốc;
b) tốc độ định mức nhỏ nhất và lớn nhất của thang máy mà bộ khống chế vượt tốc có thể đáp ứng;
c) giá trị dự tính của lực căng xuất hiện trên cáp của bộ khống chế vượt tốc khi thiết bị này được kích hoạt.
Các tài liệu sau được gửi kèm theo hồ sơ xin kiểm định: bản vẽ chi tiết, bản vẽ lắp ráp chỉ rõ kết cấu, nguyên lý hoạt động, vật liệu sử dụng, kích thước và dung sai của các bộ phận.
5.4.2 Kiểm tra đặc tính của bộ khống chế vượt tốc
5.4.2.1 Mẫu thử
Phải cung cấp cho đơn vị thử nghiệm:
a) một bộ khống chế vượt tốc;
b) một dây cáp sử dụng cho bộ khống chế vượt tốc giống như khi lắp đặt trong điều kiện bình thường. Chiều dài sợi cáp theo yêu cầu của đơn vị thử nghiệm;
c) puli căng cáp được sử dụng cho bộ khống chế vượt tốc.
5.4.2.2 Thử nghiệm
5.4.2.2.1 Phương pháp thử nghiệm
Các nội dung sau đây cần phải được kiểm tra:
a) tốc độ kích hoạt của bộ khống chế vượt tốc nằm trong giới hạn yêu cầu của bên yêu cầu thử nghiệm;
b) hoạt động của thiết bị an toàn điện để dừng máy theo yêu cầu trong các tiêu chuẩn có yêu cầu sử dụng tiêu chuẩn này (ví dụ TCVN 6396-20 (EN 81-20), 5.6.2.2.1.6 a), nếu thiết bị này được lắp trên bộ khống chế vượt tốc;
c) hoạt động của thiết bị an toàn điện theo yêu cầu trong các tiêu chuẩn có yêu cầu sử dụng tiêu chuẩn này (ví dụ TCVN 6396-20 (EN 81-20), 5.6.2.2.1.6 b) để ngăn mọi chuyển động của thang máy khi bộ khống chế vượt tốc được kích hoạt;
d) lực căng xuất hiện trên cáp của bộ khống chế vượt tốc khi thiết bị này được kích hoạt.
5.4.2.2.2 Quy trình thử nghiệm
ít nhất phải tiến hành hai mươi thử nghiệm trong phạm vi dãy tốc độ kích hoạt tương ứng với dãy tốc độ định mức của thang máy, thể hiện ở 5.4.1.b).
Phần lớn các thử nghiệm phải thực hiện với các giá trị lớn nhất và nhỏ nhất trong dãy giá trị.
Gia tốc để đạt đến tốc độ kích hoạt của bộ khống chế vượt tốc phải càng nhỏ càng tốt, nhằm loại trừ ảnh hưởng của quán tính.
Ngoài ra phải có ít nhất hai thử nghiệm được thực hiện với gia tốc nằm trong khoảng 0,9 gn và 1 gn để mô phỏng tình huống rơi tự do và chứng tỏ không có hư hỏng cho bộ khống chế vượt tốc.
5.4.2.2.3 Diễn giải kết quả thử nghiệm
Trong quá trình thực hiện hai mươi lần thử, tốc độ kích hoạt phải nằm trong giới hạn quy định cho bộ khống chế vượt tốc có trong các tiêu chuẩn có yêu cầu sử dụng tiêu chuẩn này.
CHÚ THÍCH: Nếu vượt quá giới hạn quy định, nhà sản xuất thiết bị có thể hiệu chỉnh và phải tiến hành 20 thử nghiệm mới.
Trong quá trình thực hiện hai mươi lần thử, hoạt động của thiết bị theo như yêu cầu thử nghiệm trong 5.4.2.2.1 b) và c) phải diễn ra trong phạm vi giới hạn quy định có trong các tiêu chuẩn có yêu cầu sử dụng tiêu chuẩn này (ví dụ TCVN 6396-20 (EN 81-20), 5.6.2.2.1.6 a) và 5.6.2.2.1.6 b).
Lực căng cáp khi bộ khống chế vượt tốc được kích hoạt phải đạt ít nhất 300 N hoặc bất kỳ giá trị lớn hơn được chỉ định bởi bên nộp hồ sơ kiểm định.
Nếu không có yêu cầu khác của nhà sản xuất thiết bị và ghi rõ trong báo cáo, góc ôm cáp của bộ khống chế vượt tốc nên là 180°.
Trường hợp thiết bị được tác động bởi dây cáp thì dây cáp này phải được kiểm tra để đảm bảo không bị biến dạng dư.
5.4.3 Giấy chứng nhận thử nghiệm mẫu
Giấy chứng nhận phải nêu rõ các nội dung sau:
a) các thông tin trong Phụ lục A;
b) loại và ứng dụng của bộ khống chế vượt tốc;
c) tốc độ định mức nhỏ nhất và lớn nhất của thang máy mà bộ khống chế vượt tốc có thể thích ứng;
d) đường kính và kết cấu của cáp được sử dụng;
e) lực căng nhỏ nhất của cáp đối với trường hợp bộ khống chế vượt tốc sử dụng puli ma sát;
f) lực căng cáp của bộ khống chế vượt tốc khi thiết bị này được kích hoạt.
5.5 Thử nghiệm mẫu bộ giảm chấn
5.5.1 Yêu cầu chung
Bên yêu cầu thử nghiệm cần nêu rõ phạm vi sử dụng, ví dụ tốc độ va chạm lớn nhất, khối lượng nhỏ nhất và lớn nhất. Các tài liệu sau được gửi cùng với hồ sơ yêu cầu thử nghiệm:
a) Bản vẽ chi tiết, bản vẽ lắp ráp chỉ rõ kết cấu, nguyên lý hoạt động, vật liệu sử dụng, kích thước và dung sai của các bộ phận.
Đối với giảm chấn thủy lực, cần cung cấp thêm hàm số thể hiện quan hệ giữa sức ép chất lỏng (khe hở van thủy lực) và hành trình của giảm chấn;
b) Thông số của chất lỏng được sử dụng;
c) Thông tin về điều kiện môi trường hoạt động (nhiệt độ, độ ẩm, bụi,...) và tuổi thọ sản phẩm (lão hóa, các tiêu chuẩn loại bỏ).
5.5.2 Mẫu phải cung cấp
Phải cung cấp cho cơ sở thử nghiệm:
a) một giảm chấn;
b) đối với giảm chấn thủy lực, chất lỏng dùng cho giảm chấn được gửi riêng.
5.5.3 Thử nghiệm
5.5.3.1 Giảm chấn tiêu tán năng lượng
5.5.3.1.1 Quy trình thử nghiệm
Bộ giảm chấn được thử nghiệm với sự trợ giúp của các vật nặng, tương ứng với giá trị nhỏ nhất và lớn nhất, rơi tự do để đạt tốc độ lớn nhất theo yêu cầu khi chạm vào giảm chấn.
Tốc độ được ghi lại ít nhất từ thời điểm vật nặng tác động vào giảm chấn. Gia tốc và gia tốc hãm được xác định như hàm số của thời gian trong suốt quá trình rơi của vật nặng.
5.5.3.1.2 Các thiết bị sử dụng
5.5.3.1.2.1 Vật nặng rơi tự do
Vật nặng phải có dung sai tương ứng với 5.1.2.6, cho khối lượng nhỏ nhất và lớn nhất. Vật nặng này phải được dẫn hướng theo phương thẳng đứng với độ ma sát nhỏ nhất có thể được.
5.5.3.1.2.2 Thiết bị ghi nhận kết quả
Thiết bị ghi nhận kết quả phải có khả năng phát hiện tín hiệu với dung sai đáp ứng theo 5.1.2.6. Mạch đo, bao gồm cả thiết bị ghi nhận các giá trị phụ thuộc vào thông số thời gian, phải được thiết kế với tần số ít nhất là 1000 Hz.
5.5.3.1.2.3 Đo tốc độ
Tốc độ phải được ghi lại ít nhất từ thời điểm vật nặng tiếp xúc với giảm chấn hoặc trong suốt hành trình rơi của vật nặng với dung sai theo 5.1.2.6.
5.5.3.1.2.4 Đo gia tốc hãm
Nếu có thiết bị đo gia tốc hãm (xem 5.5.3.1.1) thì nó phải được lắp đặt càng gần trục giảm chấn càng tốt, và phải có khả năng đo với dung sai theo 5.1.2.6.
5.5.3.1.2.5 Đo thời gian
Xung thời gian có độ rộng 0,01 s phải được ghi nhận và đo với dung sai theo 5.1.2.6.
5.5.3.1.3 Nhiệt độ môi trường
Nhiệt độ môi trường phải nằm trong khoảng từ + 15 °C đến + 25 °C.
Nhiệt độ chất lỏng trong giảm chấn phải đo được với dung sai theo 5.1.2.6.
5.5.3.1.4 Lắp đặt bộ giảm chấn
Giảm chấn phải được đặt đúng vị trí và cố định như khi sử dụng thực tế.
5.5.3.1.5 Nạp chất lỏng cho bộ giảm chấn
Chất lỏng được nạp vào bộ giảm chấn đến vạch đã đánh dấu theo chỉ dẫn của nhà sản xuất.
5.5.3.1.6 Kiểm tra
5.5.3.1.6.1 Kiểm tra gia tốc hãm
Độ cao rơi tự do của vật nặng phải được lựa chọn sao cho tốc độ khi vật nặng tác động vào bộ giảm chấn tương ứng với tốc độ tác động tối đa được quy định trong ứng dụng.
Gia tốc hãm phải tuân theo những yêu cầu quy định ở các tiêu chuẩn yêu cầu sử dụng thiết bị này (ví dụ TCVN 6396-20 (EN 81-20), 5.8.2.2.3).
Khoảng di chuyển cuối hành trình của bộ giảm chấn để tính toán giá trị trung bình của gia tốc hãm có thể được bỏ qua nếu gia tốc hãm nhỏ hơn 0,5 m/s2.
Lần thử đầu tiên được tiến hành với khối lượng lớn nhất và gia tốc hãm được kiểm tra.
Lần thử thứ hai được tiến hành với khối lượng nhỏ nhất và gia tốc hãm được kiểm tra.
5.5.3.1.6.2 Kiểm tra khả năng phục hồi về vị trí bình thường của bộ giảm chấn
Sau mỗi lần thử, giảm chấn được giữ ở vị trí nén hết mức trong vòng 5 min. Giảm chấn sau đó được giải phóng để hồi phục về vị trí vươn dài ban đầu.
Nếu giảm chấn thuộc loại có lò xo hoặc loại tự hồi phục nhờ trọng lực, thời gian hồi phục hoàn toàn về trạng thái ban đầu chỉ được tối đa là 120 s.
Trước khi tiến hành lần thử gia tốc hãm khác cần phải đợi ít nhất 30 min để chất lỏng quay lại thùng chứa và bọt khí được giải phóng hết.
5.5.3.1.6.3 Kiểm tra tổn thất chất lỏng
Mức chất lỏng phải được kiểm tra sau khi thực hiện hai lần thử nghiệm gia tốc hãm theo yêu cầu ở 5.5.3.1.6.1, và sau khoảng thời gian 30 min mức chất lỏng phải đủ để đảm bảo bộ giảm chấn hoạt động bình thường.
5.5.3.1.6.4 Kiểm tra tình trạng bộ giảm chấn sau quá trình thử nghiệm
Sau khi thực hiện hai lần thử nghiệm gia tốc hãm theo yêu cầu 5.5.3.1.6.1, phải không có bộ phận nào của bộ giảm chấn bị biến dạng dư và hư hỏng, nhằm đảm bảo cho bộ giảm chấn hoạt động bình thường.
5.5.3.1.7 Quy trình cho trường hợp thử nghiệm không đạt yêu cầu
Nếu kết quả thử nghiệm không đáp ứng được với khối lượng nhỏ nhất và lớn nhất theo như yêu cầu kiểm định, cơ sở thử nghiệm có thể xác định giới hạn chấp nhận được cho các khối lượng này với sự đồng ý của bên yêu cầu thử nghiệm.
5.5.3.2 Giảm chấn hấp thụ năng lượng với các đặc tính phi tuyến
5.5.3.2.1 Quy trình thử nghiệm
Bộ giảm chấn được thử nghiệm với sự trợ giúp của các vật nặng được thả rơi tự do từ một độ cao để đạt tốc độ lớn nhất theo yêu cầu khi tác động vào giảm chấn, nhưng không nhỏ hơn 0,8 m/s.
Độ cao thả rơi, tốc độ, gia tốc và gia tốc hãm được ghi nhận từ thời điểm bắt đầu thả rơi vật nặng cho đến khi ngừng lại hoàn toàn.
Khối lượng vật nặng phải tương ứng với giá trị nhỏ nhất và lớn nhất theo yêu cầu. Vật nặng phải được dẫn hướng theo phương thẳng đứng với độ ma sát nhỏ nhất có thể có để đạt được gia tốc nhỏ nhất 0,9 gn khi chạm vào bộ giảm chấn.
5.5.3.2.2 Các thiết bị sử dụng
Các thiết bị sử dụng khi thử tương ứng với các yêu cầu ở 5.5.3.1.2.
5.5.3.2.3 Nhiệt độ môi trường
Nhiệt độ môi trường phải nằm trong khoảng từ + 15 °C đến + 25 °C.
5.5.3.2.4 Lắp đặt bộ giảm chấn
Giảm chấn phải được đặt đúng vị trí và cố định như khi sử dụng thực tế.
5.5.3.2.5 Số lần thử nghiệm
Ba lần thử nghiệm được thực hiện với:
a) Khối lượng lớn nhất;
b) Khối lượng nhỏ nhất yêu cầu.
Thời gian chờ giữa hai lần thử liền nhau phải nằm trong khoảng từ 5 min đến 30 min.
Trong ba lần thử với khối lượng lớn nhất, giá trị lực đo được khi giảm chấn đi được 50 % hành trình so với chiều cao thực tế của bộ giảm chấn do bên yêu cầu thử nghiệm đưa ra không được dao động quá 5 %. Cũng với yêu cầu tương tự khi thử với khối lượng nhỏ nhất.
Trong vòng 30 min trước khi thử nghiệm, bộ giảm chấn phải được nạp sẵn sàng một lần theo phương pháp tĩnh hoặc động để tránh có thêm điều chỉnh hoặc sai lệch trong quá trình thử nghiệm.
5.5.3.2.6 Kiểm tra
5.5.3.2.6.1 Kiểm tra gia tốc hãm
Gia tốc hãm “a” (ví dụ TCVN 6396-20 (EN 81-20), 5.8.2.1.2.1) phải tuân thủ theo các yêu cầu sau:
a) Gia tốc hãm được tính toán trong đó có tính đến khoảng thời gian giữa hai giá trị tuyệt đối nhỏ nhất đầu tiên của gia tốc hãm (xem Hình 1). Gia tốc hãm không được vượt quá giá trị tối đa theo yêu cầu của các tiêu chuẩn yêu cầu sử dụng thiết bị này.
b) Các đỉnh của gia tốc hãm không được vượt quá giá trị tối đa theo yêu cầu bởi các tiêu chuẩn yêu cầu sử dụng thiết bị này.
c) Gia tốc hãm ở mức đỉnh không được vượt quá giá trị tối đa theo yêu cầu trong các tiêu chuẩn yêu cầu sử dụng thiết bị này.
d) Tốc độ hồi phục không được vượt quá giá trị tối đa theo yêu cầu trong các tiêu chuẩn yêu cầu sử dụng thiết bị này.
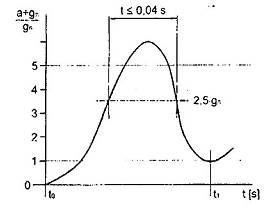
CHÚ DẪN
t0 thời điểm chạm bộ giảm chấn (giá trị tối thiểu tuyệt đối thứ nhất)
t1 giá trị tối thiểu tuyệt đối thứ hai
Hình 1 - Đồ thị gia tốc hãm - Ví dụ sử dụng các yêu cầu của TCVN 6396-20 (EN 81-20)
5.5.3.2.6.2 Kiểm tra tình trạng bộ giảm chấn sau quá trình thử nghiệm
Sau các lần thử nghiệm với khối lượng tối đa, phải không có bộ phận nào của giảm chấn bị biến dạng dư và hư hỏng, nhằm đảm bảo cho bộ giảm chấn hoạt động bình thường.
5.5.3.2.7 Quy trình cho trường hợp thử nghiệm không đạt yêu cầu
Nếu kết quả thử nghiệm không đáp ứng được với khối lượng nhỏ nhất và lớn nhất theo như yêu cầu kiểm định, đơn vị thử nghiệm có thể xác định giới hạn chấp nhận được cho các khối lượng này với sự đồng ý của bên yêu cầu thử nghiệm.
5.5.4 Giấy chứng nhận thử nghiệm mẫu
Giấy chứng nhận phải nêu rõ các nội dung sau:
a) các thông tin trong Phụ lục A;
b) loại và ứng dụng của bộ giảm chấn;
c) kích thước bộ giảm chấn;
d) tốc độ tác động lớn nhất;
e) khối lượng lớn nhất;
f) khối lượng nhỏ nhất;
g) cách lắp đặt cố định;
h) thông số kỹ thuật của chất lỏng đối trường hợp sử dụng giảm chấn thủy lực;
i) các yêu cầu về môi trường làm việc theo chỉ dẫn của nhà sản xuất (nhiệt độ, độ ẩm, bụi,...).
5.6 Thử nghiệm mẫu đối với các mạch an toàn chứa các linh kiện điện tử và/hoặc hệ thống điện tử lập trình được (PESSRAL)
5.6.1 Điều khoản chung
5.6.1.1 Yêu cầu chung
Với mạch điện chứa các linh kiện điện tử, việc thử tại đơn vị thử nghiệm rất cần thiết bởi vì kiểm định viên không thể thực hiện kiểm định tại công trình được.
Những phần tiếp theo bên dưới được ngầm hiểu sử dụng bảng mạch in. Nếu mạch an toàn không được lắp theo phương pháp này thì sẽ giả định sử dụng các kết cấu tương đương.
5.6.1.2 Các mạch an toàn chứa các linh kiện điện tử
Bên yêu cầu thử nghiệm cần chỉ rõ cho đơn vị thử nghiệm:
a) ký hiệu trên bảng mạch;
b) điều kiện môi trường làm việc;
c) danh sách linh kiện sử dụng;
d) sơ đồ của bảng mạch in;
e) sơ đồ ghép và các đánh dấu đường nối sử dụng trong mạch an toàn;
f) bản mô tả chức năng;
g) sơ đồ đi dây, bao gồm cả ý nghĩa các đầu vào và đầu ra trên bảng mạch;
h) phương pháp phân tích hư hỏng được sử dụng và kết quả ghi nhận.
5.6.1.3 Các mạch an toàn dựa trên hệ thống điện tử lập trình được
Ngoài các nội dung nêu trong 5.6.1.1, cần cung cấp thêm các tài liệu sau:
a) tài liệu và bản mô tả liên quan đến việc đo như cho trong Phụ lục B;
b) mô tả tổng quát về phần mềm được sử dụng (ví dụ: nguyên tắc lập trình, ngôn ngữ lập trình, trình biên dịch; các mô đun);
c) mô tả chức năng bao gồm cả kiến trúc phần mềm và tương tác giữa phần mềm và phần cứng;
d) mô tả các khối, mô đun, dữ liệu, biến và giao diện của chương trình;
e) danh sách các phần mềm.
5.6.2 Các mẫu thử
Cần cung cấp cho đơn vị thử nghiệm:
a) một bảng mạch in;
b) một bảng mạch trắng (chưa lắp ráp linh kiện).
5.6.3 Thử nghiệm
5.6.3.1 Thử nghiệm cơ khí
5.6.3.1.1 Yêu cầu chung
Trong quá trình thử nghiệm, đối tượng thử nghiệm (mạch in) được đặt trong trạng thái làm việc. Trong quá trình thử và sau khi thử, không được xuất hiện tình trạng và hoạt động thiếu an toàn trên bảng mạch.
5.6.3.1.2 Dao động
Các phần tử truyền dẫn của mạch an toàn cần đáp ứng các yêu cầu theo:
a) TCVN 7699-2-6 (EN 60068-2-6), Khả năng chịu tần số quét: Bảng C.2;
20 chu kỳ quét trên mỗi trục, với biên độ 0,35 mm, và trong dãy tần số 10-55 Hz;
và cũng theo:
b) TCVN 7699-2-27 (EN 60068-2-27), Gia tốc và độ rộng xung: Bảng 1:
tổ hợp của:
- gia tốc cực đại 294 m/s2 hoặc 30 gn;
- độ rộng xung tương ứng 11 ms, và
- tốc độ thay đổi tương ứng 2,1 m/s nửa chu trình hình sin.
CHÚ THÍCH: Trường hợp có lắp đặt bộ phận chống sốc cho các phần tử truyền dẫn, chúng cũng được xem như là một phần của các phần tử truyền dẫn này.
Sau quá trình thử nghiệm, khe hở không khí và khe hở phóng điện không được nhô hơn giá trị tối thiểu được chấp nhận.
5.6.3.1.3 Va chạm [TCVN 7699-2-27 (EN 60068-2-27)]
5.6.3.1.3.1 Yêu cầu chung
Thử nghiệm va chạm nhằm mục đích mô phỏng các trường hợp khi bảng mạch bị rơi, khi đó các linh kiện có nguy cơ bị nứt gẫy và bảng mạch hoạt động không an toàn.
Thử nghiệm được chia ra:
a) va đập cục bộ;
b) va đập liên tục.
Các đối tượng thử nghiệm phải đáp ứng được các yêu cầu tối thiểu sau:
5.6.3.1.3.2 Va đập cục bộ
a) dạng va đập: nửa hình sin;
b) độ lớn của gia tốc: 15 g;
c) thời gian va đập: 11 ms.
5.6.3.1.3.3 Va đập liên tục
a) độ lớn gia tốc: 10 g;
b) thời gian va đập: 16 ms;
c) 1) số lần va đập: 1000 ± 10;
2) tần số va đập: 2 lần/s.
5.6.3.2 Thử nghiệm nhiệt độ [TCVN 7699-2-14 (EN 60068-2-14)]
Nhiệt độ giới hạn khi làm việc: 0 °C đến +65 °C (nhiệt độ môi trường của thiết bị an toàn).
Điều kiện thử nghiệm:
- bảng mạch phải ở trạng thái hoạt động;
- bảng mạch được cung cấp điện áp hoạt động danh định;
- thiết bị an toàn phải hoạt động trong và sau khi thử. Nếu bảng mạch chứa các bộ phận không thuộc mạch an toàn, chúng cũng phải hoạt động khi thử nghiệm (nhưng không tính đến kết quả thử nghiệm của các bộ phận này);
- thử nghiệm được tiến hành với nhiệt độ nhỏ nhất và lớn nhất (0 °C đến + 65 °C). Thử nghiệm phải diễn ra trong ít nhất 4 h;
- nếu bảng mạch được thiết kế để làm việc với nhiệt độ nằm ngoài giới hạn trên, chúng phải được thử với các giá trị mở rộng này.
5.6.3.3 Phân tích hư hỏng của mạch an toàn điện
Cần kiểm tra hồ sơ phân tích hỏng hóc theo như yêu cầu trong các tiêu chuẩn liên quan có yêu cầu sử dụng tiêu chuẩn này (ví dụ: TCVN 6396-20 (EN 81-20), 5.11.2.3.
5.6.3.4 Thử nghiệm chức năng và độ an toàn của hệ thống PESSRAL
Ngoài việc kiểm tra lại các số liệu đo định nghĩa ở Phụ lục B, những nội dung sau cũng phải được xem xét:
a) Thiết kế của phần mềm và mã nguồn: kiểm tra tất cả các mã lệnh, chẳng hạn bằng phương pháp xem xét thiết kế hình thức (FDR), FAGAN, thông qua các kịch bản kiểm tra,...;
b) Kiểm tra phần mềm và phần cứng: kiểm tra các giá trị đo trong Phụ lục B, Bảng B.1 và B.2 và các giá trị đo được lựa chọn, ví dụ từ Bảng B.7, bằng phương pháp kiểm tra chèn lỗi (dựa trên EN 61508-2 và EN 61508-7).
5.6.4 Giấy chứng nhận thử nghiệm mẫu
Giấy chứng nhận cần nêu rõ các nội dung sau:
a) các thông tin trong Phụ lục A;
b) loại và ứng dụng của hệ thống mạch;
c) mức độ ô nhiễm theo thiết kế theo TCVN 10884-1 (EN 60664-1);
d) điện áp làm việc;
e) khoảng cách từ mạch an toàn đến các mạch điều khiển khác trên bảng mạch.
CHÚ THÍCH: Các thử nghiệm khác như độ ẩm, thay đổi khí hậu,... không phải là đối tượng xét ở đây vì không liên quan đến môi trường hoạt động bình thường của thang máy.
5.7 Thử nghiệm mẫu thiết bị chống vượt tốc cabin theo chiều lên
5.7.1 Yêu cầu chung
5.7.1.1 Yêu cầu này áp dụng cho thiết bị chống vượt tốc cabin theo chiều lên không sử dụng bộ khống chế vượt tốc, hoặc hệ thống điện tử có thể lập trình được vốn là đối tượng thử nghiệm 5.4 và 5.6. Kết quả thử nghiệm bộ hãm an toàn đã qua bước được kiểm tra xác nhận phù hợp 5.3 có thể được sử dụng để kiểm tra phạm vi áp dụng cho phép.
5.7.1.2 Bên yêu cầu thử nghiệm phải chỉ rõ phạm vi sử dụng, bao gồm:
a) khối lượng nhỏ nhất và lớn nhất, hoặc mô men xoắn;
b) tốc độ định mức nhỏ nhất (nếu có áp dụng) và lớn nhất;
c) chức năng sử dụng khi lắp với cáp bù.
5.7.1.3 Những tài liệu sau được gửi kèm theo hồ sơ xin thử nghiệm:
a) bản vẽ lắp ráp và bản vẽ chi tiết thể hiện kết cấu, nguyên lý hoạt động, vật liệu sử dụng, kích thước và dung sai của các bộ phận;
b) biểu đồ tải của các phần tử đàn hồi, nếu cần thiết;
c) thông tin chi tiết về vật liệu sử dụng, loại bộ phận mà thiết bị chống vượt tốc cabin theo chiều lên sẽ tác động lên, và phương pháp gia công bề mặt của nó (như kéo, phay, cán,...).
5.7.2 Mô tả và mẫu thử
5.7.2.1 Bên yêu cầu thử nghiệm phải chỉ rõ thử nghiệm được tiến hành với khối lượng (tính bằng kilôgam) và tốc độ kích hoạt (tính bằng mét trên giây) bằng bao nhiêu. Nếu thiết bị cần thử cho nhiều mức khối lượng, bên yêu cầu thử phải nêu rõ những giá trị đó và phương pháp hiệu chỉnh theo từng giai đoạn hay điều chỉnh liên tục.
5.7.2.2 Theo thỏa thuận của bên yêu cầu thử nghiệm và đơn vị thử nghiệm:
- một bộ thiết bị hoàn chỉnh bao gồm cả hai thành phần, thiết bị phanh và thiết bị giám sát tốc độ, hoặc
- chỉ những thiết bị không phải qua các bước được kiểm tra xác nhận phù hợp 5.3, 5.4 và 5.6;
sẽ được cung cấp bởi bên yêu cầu thử nghiệm.
Số lượng các bộ chi tiết hãm cần cho các thử nghiệm phải được kèm theo. Loại các bộ phận mà thiết bị tác động lên cũng phải được cung cấp với kích thước theo yêu cầu của đơn vị thử nghiệm.
5.7.3 Thử nghiệm
5.7.3.1 Phương pháp thử
Phương pháp thử được thỏa thuận giữa bên yêu cầu thử nghiệm và đơn vị thử nghiệm, tùy thuộc vào loại thiết bị và tính năng hoạt động của chúng sao cho đạt được các chức năng làm việc thực tế của hệ thống. Các số liệu phải đo gồm:
a) gia tốc và tốc độ;
b) quãng đường phanh;
c) gia tốc hãm.
Các số liệu đo cần thể hiện dưới dạng hàm số của thời gian.
5.7.3.2 Quy trình thử nghiệm
5.7.3.2.1 Yêu cầu chung
Ít nhất phải tiến hành hai mươi thử nghiệm với thiết bị giám sát tốc độ trong phạm dãy tốc độ kích hoạt tương ứng với dãy tốc độ định mức của thang máy cho trong 5.7.1.2.
Gia tốc của khối lượng để đạt đến tốc độ kích hoạt phải càng nhỏ càng tốt, nhằm loại trừ ảnh hưởng của quán tính.
5.7.3.2.2 Thiết bị thử nghiệm với một mức khối lượng
Đơn vị thử nghiệm sẽ tiến hành bốn lần thử với khối lượng hệ thống tương ứng với cabin không tải.
Giữa các lần thử các thành phần bị ma sát phải để nguội để trở về nhiệt độ ban đầu.
Trong quá trình thử có thể được sử dụng vài cụm bộ phận bị ma sát giống nhau.
Tuy nhiên, mỗi cụm bộ phận phải có khả năng thực hiện:
a) ba lần thử, nếu tốc độ định mức không vượt quá 4 m/s;
b) hai lần thử, nếu tốc độ định mức vượt quá 4 m/s.
Các thử nghiệm được tiến hành với tốc độ kích hoạt lớn nhất mà thiết bị sẽ đáp ứng khi được sử dụng.
5.7.3.2.3 Thiết bị dùng thử nghiệm với các mức khối lượng khác nhau
Việc hiệu chỉnh diễn ra theo từng giai đoạn hoặc liên tục.
Một loạt thử nghiệm được tiến hành với khối lượng lớn nhất được áp dụng và một loạt thử nghiệm được tiến hành với khối lượng nhỏ nhất. Bên yêu cầu thử nghiệm phải cung cấp công thức, hoặc đồ thị chỉ rõ sự biến đổi của lực phanh phụ thuộc vào các thông số cho trước.
Đơn vị thử nghiệm sẽ dùng phương thức phù hợp (bằng cách thiết lập dãy thông số thứ ba cho các điểm trung gian, nếu không có phương pháp tốt hơn) để thử nghiệm công thức đã cho.
5.7.3.2.4 Thiết bị giám sát vượt tốc
5.7.3.2.4.1 Quy trình thử nghiệm
Ít nhất phải tiến hành hai mươi thử nghiệm trong dãy tốc độ kích hoạt mà không sử dụng thiết bị phanh. Phần lớn các thử nghiệm phải thực hiện với các giá trị lớn nhất và nhỏ nhất trong dãy giá trị.
5.7.3.2.4.2 Diễn giải kết quả
Trong hai mươi lần thử, tốc độ kích hoạt phải nằm trong giới hạn theo như yêu cầu ở các tiêu chuẩn yêu cầu sử dụng tiêu chuẩn này (ví dụ TCVN 6396-20 (EN 81-20), 5.6.6.1).
5.7.3.3 Kiểm tra sau thử nghiệm
Sau khi thử nghiệm:
a) độ cứng của chi tiết hãm phải được so sánh với số liệu gốc cung cấp bởi bên yêu cầu thử nghiệm;
b) nếu không bị gãy, sẽ kiểm tra độ biến dạng hoặc các thay đổi khác (ví dụ nứt, biến dạng hoặc mòn của các chi tiết hãm, bề mặt ma sát);
c) nếu cần thiết, chụp ảnh các chi tiết hãm và bộ phận mà thiết bị tác động lên để làm bằng chứng cho sự biến dạng hoặc nứt gãy.
d) phải kiểm tra để đảm bảo gia tốc hãm khi thử với khối lượng nhỏ nhất không được vượt quá 1 gn.
5.7.4 Khả năng sửa đổi các hiệu chỉnh
Nếu trong quá trình thử, các giá trị nhận được sai lệch quá 20 % so với các giá trị mong muốn của bên yêu cầu thử nghiệm, các thử nghiệm khác có thể được tiến hành với sự đồng ý của bên yêu cầu thử, sau khi đã sửa đổi các hiệu chỉnh nếu cần thiết.
5.7.5 Báo cáo kết quả thử nghiệm
Để có thể lặp lại thử nghiệm, quá trình kiểm tra mẫu phải ghi nhận tất cả các chi tiết, ví dụ:
- phương pháp thử được xác định giữa bên yêu cầu thử nghiệm và đơn vị thử nghiệm;
- mô tả việc chuẩn bị thử nghiệm;
- vị trí lắp đặt thiết bị được thử nghiệm khi thử nghiệm;
- số lần thử;
- bản ghi tất cả giá trị đo được;
- biên bản giám sát quá trình thử nghiệm;
- đánh giá kết quả thử nghiệm có đạt yêu cầu hay không.
5.7.6 Giấy chứng nhận thử nghiệm mẫu
Giấy chứng nhận phải nêu rõ:
a) các thông tin theo Phụ lục A;
b) loại và ứng dụng của bộ khống chế vượt tốc;
c) giới hạn của các khối lượng cho phép;
d) dãy tốc độ kích hoạt của thiết bị giám sát vượt tốc;
e) loại bộ phận mà các thiết bị hãm tác động lên.
5.8 Thử nghiệm mẫu thiết bị bảo vệ cabin di chuyển không định trước
5.8.1 Yêu cầu chung
Thiết bị bảo vệ cabin di chuyển không định trước phải được thử nghiệm mẫu như là một hệ thống hoàn chỉnh hoặc thực hiện kiểm tra mẫu cho từng hệ thống con thực hiện các chức năng phát hiện, kích hoạt và ngừng cabin. Quá trình thử nghiệm mẫu các hệ thống con phải xác định tình trạng giao diện kết nối và các tham số phù hợp của từng hệ thống con nếu chúng được tích hợp vào một hệ thống hoàn chỉnh.
Bên yêu cầu thử nghiệm phải xác định các thông số chính sử dụng cho hệ thống hoặc hệ thống con tham gia vào quá trình kiểm tra mẫu:
- khối lượng nhỏ nhất và lớn nhất;
- giá trị lực nhỏ nhất và lớn nhất hoặc mô men xoắn hoặc áp suất chất lỏng, nếu có;
- thời gian đáp ứng của bộ cảm biến, mạch điều khiển và các chi tiết hãm;
- tốc độ cao nhất dự tính trước khi xảy ra quá trình giảm tốc (xem chú thích 1);
- khoảng cách tính từ sàn nơi sẽ lắp đặt bộ cảm biến;
- tốc độ thử nghiệm (xem chú thích 2);
- giới hạn nhiệt độ và độ ẩm của thiết kế và bất kỳ thông tin liên quan nào khác theo như thỏa thuận giữa bên yêu cầu thử nghiệm và đơn vị thử nghiệm.
CHÚ THÍCH 1: Lấy thang máy dẫn động ma sát làm ví dụ chỉ dẫn, nếu thang này có gia tốc “tự nhiên” là 1,5 m/s2 và động cơ không tạo ra mô men xoắn, thì tốc độ tối đa có thể đạt được là 2 m/s. Tính toán này dựa trên tốc độ đạt được ở giai đoạn bắt đầu của quá trình giảm tốc, ví dụ là kết quả của gia tốc “tự nhiên” 1,5 m/s2 thông qua thời gian đáp ứng của thiết bị bảo vệ cabin chuyển động không định trước, mạch điều khiển và bộ phận hãm, với giả định rằng bộ cảm biến chuyển động sẽ hoạt động khi cabin đi đến giới hạn của vùng mở khóa.
Trong trường hợp có hư hỏng về điện, đối với thang máy dẫn động ma sát có thể giả định rằng do tác động của thiết bị điều khiển bên trong, gia tốc có thể đạt được không lớn hơn 2,5 m/s2.
CHÚ THÍCH 2: Tốc độ thử nghiệm: là tốc độ do nhà sản xuất công bố, được sử dụng bởi đơn vị thử nghiệm để tính quãng đường di chuyển của thang máy (quãng đường kiểm tra), qua đó thông qua quá trình kiểm tra và thử nghiệm, hệ thống bảo vệ di chuyển không định trước sẽ được kiểm tra và thử nghiệm để đảm bảo hoạt động đúng khi đưa vào sử dụng tại công trình. Đây có thể là tốc độ kiểm tra hoặc bất kỳ tốc độ nào khác được xác định bởi nhà sản xuất và có sự đồng ý của đơn vị thử nghiệm.
Quãng đường cabin được phép di chuyển khi chuyển động không định trước được xác định theo các yêu cầu có trong các tiêu chuẩn yêu cầu sử dụng tiêu chuẩn này [ví dụ TCVN 6396-20 (EN 81-20), 5.6.7.5].
Cần đính kèm theo hồ sơ xin thử nghiệm những tài liệu sau:
a) bản vẽ lắp ráp và bản vẽ chi tiết thể hiện kết cấu, nguyên lý hoạt động, vật liệu sử dụng, kích thước và dung sai của các bộ phận;
b) biểu đồ tải của các phần tử đàn hồi, nếu cần thiết;
c) thông tin chi tiết về vật liệu sử dụng, loại bộ phận mà thiết bị tác động lên và phương pháp gia công bề mặt của nó, nếu phù hợp (như kéo, phay, cán,...).
5.8.2 Mô tả và mẫu thử
5.8.2.1 Bên yêu cầu thử nghiệm phải nêu rõ mục đích sử dụng của thiết bị.
5.8.2.2 Các mẫu thử được cung cấp theo như thỏa thuận giữa bên yêu cầu thử nghiệm và đơn vị thử nghiệm, nếu thấy phù hợp, bao gồm một bộ hoàn chỉnh thiết bị phát hiện cabin di chuyển không định trước, mạch điều khiển (bộ tác động), các chi tiết hãm và bất kỳ thiết bị giám sát nào nếu có.
Số lượng các bộ chi tiết hãm cần cho các thử nghiệm phải được kèm theo.
Loại của các bộ phận mà thiết bị tác động lên cũng phải được cung cấp, kèm với kích thước được chỉ định bởi đơn vị thử nghiệm.
5.8.3 Thử nghiệm
5.8.3.1 Phương pháp thử
Phương pháp thử được thỏa thuận giữa bên yêu cầu thử nghiệm và đơn vị thử nghiệm, tùy thuộc vào loại thiết bị và tính năng hoạt động của chúng, sao cho đạt được các tính năng làm việc thực tế của hệ thống.
Các số liệu phải đo gồm:
- quãng đường hãm;
- gia tốc hãm trung bình;
- thời gian đáp ứng của thiết bị cảm biến, bộ dẫn động, chi tiết hãm và mạch điều khiển (xem Hình 2);
- tổng quãng đường di chuyển (tổng của quãng đường tăng tốc và quãng đường hãm).
Thử nghiệm cũng bao gồm:
- hoạt động của thiết bị phát hiện cabin di chuyển không định trước và
- bất kỳ thiết bị giám sát tự động nào, nếu có.
CHÚ DẪN
![]() thời điểm tại đó các chi tiết hãm bắt đầu
làm tốc độ chậm lại;
thời điểm tại đó các chi tiết hãm bắt đầu
làm tốc độ chậm lại;
![]() thời gian đáp ứng của thiết bị phát hiện
cabin di chuyển không định trước và bất kỳ mạch điều khiển nào;
thời gian đáp ứng của thiết bị phát hiện
cabin di chuyển không định trước và bất kỳ mạch điều khiển nào;
![]() thời gian đáp ứng của mạch dẫn động và các
chi tiết hãm.
thời gian đáp ứng của mạch dẫn động và các
chi tiết hãm.
Hình 2 - Thời gian đáp ứng
5.8.3.2 Quy trình thử nghiệm
5.8.3.2.1 Yêu cầu chung
Thực hiện hai mươi thử nghiệm với chi tiết hãm, trong đó:
- không có kết quả nào nằm ngoài thông số kỹ thuật;
- mỗi kết quả nằm trong khoảng dao động ± 20 % giá trị trung bình.
Giá trị trung bình được thể hiện trên giấy chứng nhận.
5.8.3.2.2 Thiết bị thử nghiệm với một mức khối lượng hoặc mô men xoắn hoặc áp suất chất lỏng.
Đơn vị thử nghiệm sẽ tiến hành mười thử nghiệm với mức khối lượng hệ thống hoặc mô men xoắn hoặc áp suất chất lỏng tương ứng với cabin không tải đi lên và mười thử nghiệm với mức khối lượng hệ thống hoặc mô men xoắn hoặc áp suất chất lỏng tương ứng với cabin mang tải danh định đi xuống.
Giữa các lần thử nghiệm, các bộ phận bị ma sát sẽ được để nguội để trở về nhiệt độ bình thường.
Trong quá trình thử nghiệm có thể sử dụng vài cụm bộ phận bị ma sát giống nhau. Tuy nhiên, mỗi cụm thiết bị phải có khả năng thực hiện tối thiểu 5 lần thử nghiệm.
5.8.3.2.3 Thiết bị thử nghiệm với nhiều mức khối lượng hoặc mô men xoắn hoặc áp suất chất lỏng.
Một loạt thử nghiệm được tiến hành với khối lượng lớn nhất được áp dụng và một loạt thử nghiệm được tiến hành với khối lượng nhỏ nhất.
Bên yêu cầu thử nghiệm cần cung cấp công thức, hoặc đồ thị chỉ rõ sự biến đổi của lực phanh hoặc mô men xoắn hoặc áp suất chất lỏng phụ thuộc vào các thông số cho trước.
Đơn vị thử nghiệm sẽ kiểm tra độ chính xác của công thức hoặc đồ thị.
5.8.3.2.4 Quy trình thử nghiệm cho thiết bị phát hiện cabin chuyển động không định trước
Mười thử nghiệm sẽ được tiến hành để kiểm tra hoạt động của thiết bị. Tất cả thử nghiệm phải cho ra kết quả tích cực nhằm xác nhận thiết bị hoạt động đúng.
5.8.3.2.5 Quy trình thử nghiệm cho quá trình tự giám sát
Mười thử nghiệm sẽ được tiến hành để kiểm tra hoạt động của thiết bị. Tất cả thử nghiệm phải cho ra kết quả tích cực nhằm xác nhận thiết bị hoạt động đúng.
Ngoài ra, cũng phải kiểm tra khả năng tự giám sát để phát hiện có bị thiếu chi tiết hãm dự phòng hay không trước khi một tình huống nghiêm trọng diễn ra.
5.8.3.3 Kiểm tra sau thử nghiệm
Sau thử nghiệm:
a) đặc tính cơ khí của chi tiết hãm phải được so sánh với số liệu gốc cung cấp bởi bên yêu cầu thử nghiệm. Trong những trường hợp đặc biệt có thể thực hiện các phân tích khác;
b) cần kiểm tra để đảm bảo không có bị gãy, hoặc biến dạng hoặc các thay đổi khác (ví dụ nứt, biến dạng hoặc mòn của các chi tiết hãm, bề mặt ma sát);
c) nếu cần thiết, chụp ảnh các chi tiết hãm và bộ phận mà thiết bị tác động lên để làm bằng chứng cho sự biến dạng hoặc nứt gãy.
5.8.4 Khả năng sửa đổi các hiệu chỉnh
Nếu trong quá trình thử, các giá trị nhận được sai lệch quá 20 % so với các giá trị mong muốn của bên yêu cầu thử nghiệm, các thử nghiệm khác có thể được tiến hành với sự đồng ý của bên yêu cầu thử, sau khi đã sửa đổi các hiệu chỉnh nếu cần thiết.
5.8.5 Báo cáo thử nghiệm
Để có thể lặp lại thử nghiệm, quá trình kiểm tra mẫu phải ghi nhận lại tất cả các chi tiết, như:
- phương pháp thử được xác định giữa bên yêu cầu thử nghiệm và đơn vị thử nghiệm;
- mô tả việc chuẩn bị thử nghiệm;
- vị trí lắp đặt thiết bị được thử nghiệm khi thử nghiệm;
- số lần thử;
- bản ghi tất cả giá trị đo được;
- biên bản giám sát quá trình thử nghiệm;
- đánh giá kết quả thử nghiệm có đạt yêu cầu hay không.
5.8.6 Giấy chứng nhận thử nghiệm mẫu
Giấy chứng nhận phải nêu rõ:
a) các thông tin theo Phụ lục A;
b) loại và ứng dụng của hệ thống/hệ thống con bảo vệ cabin chuyển động không định trước;
c) giới hạn của các tham số chính (theo như thống nhất giữa đơn vị thử nghiệm và nhà sản xuất);
d) tốc độ thử nghiệm với các tham số phù hợp cho quá trình kiểm tra lần cuối;
e) loại bộ phận mà các thiết bị hãm tác động lên;
f) sự kết hợp của thiết bị “cảm biến” và chi tiết “hãm” của bộ thiết bị trong trường hợp là hệ thống hoàn chỉnh;
g) điều kiện giao diện kết nối trong trường hợp là hệ thống con.
5.9 Thử nghiệm mẫu van ngắt/van một chiều
Trong những phần tiếp theo sau, thuật ngữ “van ngắt” có nghĩa là “van ngắt/van một chiều với các bộ phận cơ khí chuyển động”.
5.9.1 Điều khoản chung
5.9.1.1 Yêu cầu chung
Bên yêu cầu thử nghiệm phải xác định các thông số của van ngắt mẫu, bao gồm:
a) Phạm vi của:
1) lưu lượng;
2) áp suất;
3) độ nhớt;
4) nhiệt độ môi trường;
b) Phương pháp lắp đặt.
Bản vẽ chi tiết và bản vẽ lắp ráp chỉ rõ kết cấu, nguyên lý hoạt động, hiệu chỉnh, vật liệu sử dụng, kích thước và dung sai của van ngắt và các bộ phận kết cấu phải được kèm theo hồ sơ xin thử nghiệm.
5.9.1.2 Mẫu thử phải cung cấp
Phải nộp cho đơn vị thử nghiệm:
a) một van ngắt;
b) một danh sách các loại chất lỏng sử dụng cùng với van ngắt hoặc một lượng vừa đủ của loại chất lỏng đặc biệt được sử dụng;
c) phương tiện phối hợp với những thiết bị thử nghiệm của đơn vị thử nghiệm, nếu cần thiết.
5.9.1.3 Thử nghiệm
5.9.1.3.1 Lắp đặt cho việc thử nghiệm
Van ngắt, được lắp đặt theo phương pháp yêu cầu, sẽ được thử nghiệm trong một hệ thống thủy lực, trong đó:
a) áp suất thử nghiệm theo yêu cầu phụ thuộc vào khối lượng:
b) lưu lượng được điều khiển bằng van điều chỉnh được;
c) có thể ghi nhận được áp suất phía trước van ngắt3) và phía sau van ngắt;
d) trang bị nhiều cách lắp đặt để thay đổi nhiệt độ môi trường của van ngắt và độ nhớt của dòng chất lỏng thủy lực.
Hệ thống cho phép ghi nhận lưu lượng theo thời gian. Để xác định giá trị lưu lượng, có thể thực hiện đo thông số khác, ví dụ, vận tốc pit tông, nơi xuất phát của dòng lưu lượng.
5.9.1.3.2 Các thiết bị đo
Thiết bị đo phải có độ chính xác theo yêu cầu ở 5.1.2.6.
5.9.1.4 Quy trình thử nghiệm
5.9.1.4.1 Yêu cầu chung
Thử nghiệm phải:
a) mô phỏng sự cố hư hỏng toàn phần đối với ống dẫn xảy ra khi tốc độ cabin bằng không;
b) đánh giá khả năng chịu áp suất của van ngắt.
5.9.1.4.2 Mô phỏng sự cố hư hỏng toàn phần đối với ống dẫn
5.9.1.4.2.1 Theo mô phỏng sự cố hư hỏng toàn phần đối với ống dẫn, dòng chảy sẽ xuất phát từ vị trí tĩnh bằng cách mở van với điều kiện là áp suất tĩnh phía trước van ngắt giảm về ít hơn 10%.
Các dung sai của van đang đóng khi được tính đến phải nằm trong giới hạn được xác định của:
a) lưu lượng;
b) độ nhớt;
c) áp suất;
d) nhiệt độ môi trường.
Điều này có thể đạt được sau 2 chuỗi thử nghiệm với:
- áp suất lớn nhất, nhiệt độ môi trường lớn nhất, dòng lưu lượng có thể điều chỉnh được nhỏ nhất và độ nhớt nhỏ nhất;
- áp suất nhỏ nhất, nhiệt độ môi trường nhỏ nhất, dòng lưu lượng có thể điều chỉnh được lớn nhất và độ nhớt lớn nhất.
Trong mỗi chuỗi thử nghiệm phải tiến hành ít nhất mười lần thử nghiệm, để đánh giá dung sai hoạt động của van an toàn trong những điều kiện trên.
5.9.1.4.2.2 Trong quá trình thử nghiệm, phải ghi lại mối quan hệ giữa:
- lưu lượng và thời gian;
- áp suất phía trước van ngắt và thời gian;
- áp suất phía sau van ngắt và thời gian,
Các đặc tính điển hình của các đường cong này được thể hiện ở Hình 3.
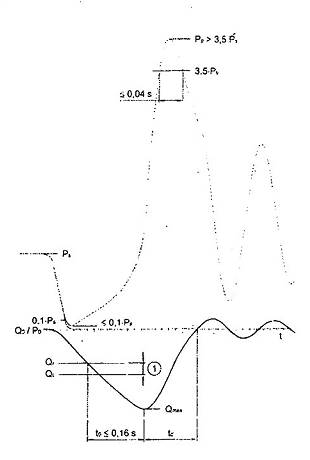
CHÚ DẪN
P0 áp suất trước khi thử
Pp áp suất đỉnh
Ps áp suất tĩnh
Q0 lưu lượng trước khi thử
Qmax lưu lượng tối đa
Qr lưu lượng ở thời điểm phát hiện tốc độ định mức
Qt lưu lượng ở thời điểm tác động
t thời gian
t0 khoảng thời gian từ lúc phát hiện cho đến lúc lưu lượng tối đa trước khi đóng
td khoảng thời gian từ lúc lưu lượng đóng lớn nhất đến khi lưu lượng bằng không trước khi bật lại
![]() áp suất phía sau van ngắt
áp suất phía sau van ngắt
![]() dòng chất lỏng thủy lực
dòng chất lỏng thủy lực
![]() áp suất phía trước van ngắt
áp suất phía trước van ngắt
![]() van ngắt sẽ bị kích hoạt trước khi tốc độ bằng
với tốc độ định mức + 0,3 m/s
van ngắt sẽ bị kích hoạt trước khi tốc độ bằng
với tốc độ định mức + 0,3 m/s
Hình 3 - Dòng chất lỏng thủy lực chảy qua, áp suất phía trước và phía sau van ngắt
5.9.1.4.3 Khả năng chịu áp suất
Để chứng tỏ khả năng chịu áp suất, van ngắt phải trải qua thử nghiệm áp suất với mức áp suất có độ lớn gấp 5 lần áp suất tối đa trong 2 min.
5.9.1.5 Diễn giải quá trình thử nghiệm
5.9.1.5.1 Quá trình đóng
Van ngắt đáp ứng các yêu cầu của tiêu chuẩn nếu các đường cong ghi nhận được trong 5.9.1.4.2 cho thấy:
a) Khoảng thời gian t0 giữa lưu lượng danh định (100 % lưu lượng) và lưu lượng tối đa Qmax không vượt quá 0,16 s;
|
b) Khoảng thời gian td để giảm lưu lượng là: |
|
trong đó:
A là diện tích của kích, nơi áp suất tác động lên, tính bằng xăng ti mét vuông
Qmax là lưu lượng tối đa của dòng thủy lực tính bằng lít trên phút;
td là thời gian hãm tính bằng giây;
c) Áp suất lớn hơn 3,5 • PS không được kéo dài hơn 0,04 s;
trong đó
PS là áp suất tĩnh
d) Van ngắt sẽ bị kích hoạt trước khi tốc độ bằng với tốc độ định mức + 0,3 m/s.
5.9.1.5.2 Khả năng chịu áp suất
Van ngắt sẽ đáp ứng những yêu cầu của tiêu chuẩn nếu sau thử nghiệm áp suất trong 5.9.1.4.3 trên thiết bị không xuất hiện những hư hỏng vĩnh viễn.
5.9.1.5.3 Điều chỉnh lại
Nếu các mức giới hạn của dòng lưu lượng giảm xuống hoặc áp suất đỉnh bị vượt qua, nhà sản xuất có thể điều chỉnh lại van ngắt. Sau đó một chuỗi thử nghiệm khác sẽ được tiến hành.
5.9.1.6 Giấy chứng nhận thử nghiệm mẫu
Giấy chứng nhận phải nêu rõ:
a) Các thông tin theo Phụ lục A;
b) Loại và phạm vi áp dụng của van ngắt;
c) Phạm vi của
1) lưu lượng của van ngắt;
2) áp suất của van ngắt;
3) độ nhớt của chất lỏng thủy lực được sử dụng;
4) nhiệt độ môi trường của van ngắt.
Giấy chứng nhận phải đi kèm với đồ thị như Hình 3, thể hiện mối quan hệ giữa lưu lượng dòng chất lỏng thủy lực và áp suất để từ đó có thể tính được các giá trị Qmax và td.
5.10 Tính toán ray dẫn hướng
5.10.1 Phạm vi tính toán
Ray dẫn hướng phải có kích thước xác định trên cơ sở các loại ứng suất:
- ứng suất uốn;
- ứng suất uốn hỗn hợp;
- ứng suất uốn dọc;
- ứng suất nén/ứng suất kéo;
- ứng suất uốn hỗn hợp và nén/kéo;
- ứng suất kết hợp uốn và uốn dọc;
- ứng suất uốn cạnh ray.
Ngoài ra cũng phải phân tích độ võng.
CHÚ THÍCH: Ví dụ về các tính toán dựa trên phương pháp ở phần tiếp theo được cho trong Phụ lục C.
5.10.2 Ứng suất uốn
5.10.2.1 Khi tính toán ứng suất uốn theo các trục khác nhau của ray dẫn hướng (Hình 4), có thể giả định rằng: tác động lên đoạn ray tại điểm nằm giữa hai gối liền kề.
- ray được coi như dầm liên tục với các gối đàn hồi cách nhau các khoảng cách /;
- hợp lực tạo ra ứng suất uốn tác động tại điểm nằm giữa hai gối liền kế;
- mô men uốn tác động lên trục trung hòa của mặt cắt tiết diện ray.
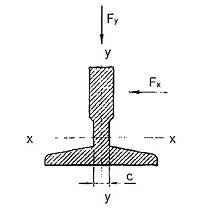
Hình 4 - Trục của ray dẫn hướng
Để tính toán ứng suất uốn - σm - do lực theo phương
ngang tác dụng vuông góc với trục của tiết diện ray, những công thức sau sẽ được
sử dụng: ![]() với
với ![]()
trong đó:
Fh là lực theo phương ngang tác động lên ray từ ngàm dẫn hướng, tính bằng Newton, tính tùy theo trường hợp tải trọng;
l là khoảng cách lớn nhất giữa hai giá đỡ cố định ray, tính bằng milimét;
Mm là mô men uốn, tính bằng Newton milimét;
σm là ứng suất uốn, tính bằng Newton trên milimét vuông;
W là mô men kháng uốn của tiết diện, tính bằng milimét khối;
5.10.2.2 Ứng suất uốn trên các trục khác nhau phải được kết hợp lại, trong đó có tính đến hình dạng ray dẫn hướng.
Nếu Wx và Wy (tương ứng với Wxmin và Wymin) sử dụng giá trị từ các bảng tra cứu thông dụng và ứng suất không cao hơn giá trị cho phép thì không cần phải tính tiếp. Trường hợp ngược lại cần phân tích xem giá trị ứng suất kéo lớn nhất nằm trên phần rìa nào của thanh ray.
5.10.2.3 Nếu có nhiều hơn hai ray dẫn hướng được sử dụng, có thể giả định rằng lực được phân bố đều trên các thanh ray, miễn là chúng cùng loại.
5.10.2.4 Nếu có nhiều hơn một bộ hãm an toàn được sử dụng và tác động lên các thanh ray dẫn hướng khác nhau, có thể giả định rằng lực phanh tổng được phân bố đều giữa các bộ hãm.
5.10.2.5 Trường hợp có nhiều bộ hãm an toàn bố trí theo phương thẳng đứng tác động lên cùng thanh ray, khi đó sẽ giả định rằng lực phanh chỉ tác động lên một điểm của một thanh ray
5.10.3 Uốn dọc
Để xác định ứng suất uốn dọc, phải sử dụng phương pháp “omega” theo công thức sau:
![]()
trong đó
A là diện tích tiết diện ray dẫn hướng, tính bằng milimét vuông;
Fv là lực theo phương đứng tác động lên thanh ray dẫn hướng của cabin, đối trọng hoặc khối lượng cân bằng, tính bằng Newton;
k3 hệ số tác động;
Maux là lực tác động lên ray từ các thiết bị phụ trợ, tính bằng Newton;
σk là ứng suất uốn dọc, tính bằng Newton trên milimét vuông;
ω là giá trị omega.
Giá trị “omega” có thể được tính theo các công thức ở phần tiếp theo:
với: λ = ![]() và lk = l
và lk = l
trong đó:
λ = ![]() là độ mảnh của ray;
là độ mảnh của ray;
i là bán kính quán tính nhỏ nhất, tính bằng milimét;
I là khoảng cách lớn nhất giữa 2 giá đỡ cố định ray, tính bằng milimét;
lk là chiều dài quy đổi khi tính uốn dọc, tính bằng milimét;
Với vật liệu thép có độ bền kéo Rm = 370 N/mm2:
|
20 ≤λ≤ 60 : |
ω = 0,00012920• λ1,89 + 1; |
|
60 <λ≤85 : |
ω = 0,00004627• λ2,14 + 1; |
|
85 <λ< 115 : |
ω = 0,00001711• λ2,35 + 1,04; |
|
115 <λ≤250 : |
ω = 0,00016887• λ2,00 |
Với vật liệu thép có độ bền kéo Rm = 520 N/mm2:
|
20 ≤λ≤ 50 : |
ω = 0,00008240• λ2,06 + 1,021; |
|
50 <λ≤ 70 : |
ω = 0,00001895• λ2,41 + 1,05; |
|
70 <λ< 89 : |
ω = 0,00002447• λ2,36 + 1,03; |
|
89 <λ≤ 250 : |
ω = 0,00025330• λ2,00 |
Việc xác định giá trị “omega” của vật liệu thép có độ bền kéo Rm nằm trong khoảng giữa 370 N/mm2 và 520 N/mm2 được thực hiện bằng cách sử dụng công thức sau:
![]()
5.10.4 Kết hợp ứng suất uốn và ứng suất nén/kéo hoặc ứng suất uốn dọc
ứng suất tổng hợp do các ứng suất uốn, nén/kéo hoặc uốn dọc phải tính toán theo các công thức sau:
Ứng suất uốn xiên ![]()
Uốn kết hợp với nén/kéo ![]()
Uốn kết hợp với uốn dọc ![]()
trong đó:
A là diện tích tiết diện ray dẫn hướng, tính bằng milimét vuông;
Fv là lực theo phương đứng tác động lên thanh ray dẫn hướng của cabin, đối trọng hoặc khối lượng cân bằng, tính bằng Newton;
k3 hệ số tác động;
Maux là lực tác động lên ray từ các thiết bị ngoại vi, tính bằng Newton;
σ là ứng suất tổng hợp, tính bằng Newton trên milimét vuông;
σk là ứng suất uốn dọc, tính bằng Newton trên milimét vuông;
σm là ứng suất uốn, tính bằng Newton trên milimét vuông;
σperm là ứng suất cho phép, tính bằng Newton trên milimét vuông; xem các tiêu chuẩn yêu cầu sử dụng tiêu chuẩn này (ví dụ TCVN 6396-20 (EN 81-20), 5.7.4.5;
σx là ứng suất uốn theo trục x, tính bằng Newton trên milimét vuông;
σy là ứng suất uốn theo trục y, tính bằng Newton trên milimét vuông.
5.10.5 Uốn cạnh ray
Cần lưu ý đến ứng suất uốn cạnh ray. Với ray dẫn hướng dạng chữ T, công thức sau đây được sử dụng:
|
|
cho ngàm dẫn hướng dạng con lăn |
|
|
cho ngàm dẫn hướng dạng bạc trượt |
trong đó:
b phân nửa độ rộng thành của ngàm dẫn hướng, tính bằng milimét;
c là độ rộng của phần chuyển tiếp giữa chân ray và mặt ray, tính bằng milimét;
f là độ sâu phần chân ray dẫn hướng tại phần chuyển tiếp với mặt ray, tính bằng milimét;
Fx là lực tác dụng từ ngàm dẫn hướng vào thành bên ray, tính bằng Newton;
h1 là chiều cao ray dẫn hướng, tính bằng milimét;
l là chiều dài thành của ngàm dẫn hướng, tính bằng milimét;
σF là ứng suất uốn cục bộ tại cạnh ray, tính bằng Newton trên milimét vuông;
σperm là ứng suất cho phép, tính bằng Newton trên milimét vuông.
CHÚ THÍCH: Các kích thước được cho trong Hình 5.
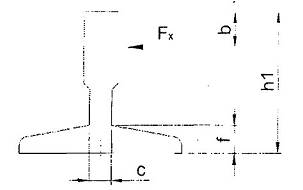
Hình 5 - Kích thước cho việc tính toán ứng suất uốn cạnh ray
5.10.6 Độ võng
Độ võng sẽ được tính toán theo công thức sau:
![]()
![]()
trong đó:
δperm là độ võng cho phép tối đa, tính bằng milimét;
δx là độ võng theo trục X, tính bằng milimét;
δy là độ võng theo trục Y, tính bằng milimét;
δstr-x là độ võng theo trục x của kết cấu công trình, tính bằng milimét;
δstr-y là độ võng theo trục y của kết cấu công trình, tính bằng milimét;
E là mô đun đàn hồi của vật liệu ray, tính bằng Newton trên milimét vuông;
Fx là lực đỡ tác dụng theo phương X, tính bằng Newton;
Fy là lực đỡ tác dụng theo phương Y, tính bằng Newton;
lx là mô men quán tính của tiết diện ray theo trục X, tính bằng mm4;
ly là mô men quán tính của tiết diện ray theo trục Y, tính bằng mm4.
l là khoảng cách lớn nhất giữa 2 giá đỡ cố định ray, tính bằng milimét;
5.11 Tính toán dẫn động ma sát
5.11.1 Yêu cầu chung
Dẫn động ma sát phải luôn đảm bảo cho tất cả các trường hợp sau:
- trong khi di chuyển bình thường
- khi chất hoặc dỡ tải tại sàn tầng
- khi giảm tốc do dừng khẩn cấp
Nếu mô men xoắn của máy dẫn động đủ lớn phải cho phép xảy ra trượt nếu cabin hoặc đối trọng ngừng chuyển động trong giếng thang.
Trình tự xác định các giá trị dưới đây áp dụng cho việc tính toán dẫn động ma sát đối với các thang máy truyền thống sử dụng cáp thép và puli thép/gang.
CHÚ THÍCH: Các kết quả đạt được, theo như kinh nghiệm thực tế, là an toàn nhờ vào giới hạn an toàn có sẵn. Do đó không cần xem xét chi tiết những yếu tố sau: Kết cấu cáp, loại và số lượng dầu bôi trơn, vật liệu puli ma sát và cáp, dung sai sản xuất.
5.11.2 Tính toán lực kéo
5.11.2.1 Yêu cầu chung
Phải áp dụng các công thức sau:
![]() cho trường hợp chất tải và dừng thang khẩn cấp;
cho trường hợp chất tải và dừng thang khẩn cấp;
![]() cho trường hợp cabin/đối trọng ở trạng thái
ngừng chuyển động (cabin/đối trọng tì lên bộ giảm chấn và máy dẫn động vẫn quay
theo chiều “xuống/lên”), khi đó việc ngăn cabin hay đối trọng đi lên được thực
hiện bằng cách giới hạn lực ma sát:
cho trường hợp cabin/đối trọng ở trạng thái
ngừng chuyển động (cabin/đối trọng tì lên bộ giảm chấn và máy dẫn động vẫn quay
theo chiều “xuống/lên”), khi đó việc ngăn cabin hay đối trọng đi lên được thực
hiện bằng cách giới hạn lực ma sát:
trong đó:
α là góc ôm của cáp lên pulima sát;
f là hệ số ma sát tương đương;
T1, T2 là lực căng trên các nhánh cáp vắt qua puli ma sát.
5.11.2.2 Tính toán T1 và T2
5.11.2.2.1 Trường hợp chất tải cho cabin
Hệ số T1/T2 tĩnh được tính toán cho trường hợp xấu nhất phụ thuộc vào vị trí của cabin trong giếng thang với 125 % tải định mức.
Nếu có sử dụng những thiết bị để chất/dỡ tải vào cabin mà khối lượng các thiết bị này chưa được tính trọng tải định mức của cabin thì phải cộng thêm vào tải định mức khi thực hiện bước tính toán này.
5.11.2.2.2 Trường hợp phanh khẩn cấp
Hệ số T1/T2 động được tính toán cho trường hợp xấu nhất phụ thuộc vào vị trí của cabin trong giếng thang và điều kiện tải (không tải, hoặc với tải danh định).
Các chi tiết chuyển động phải được xem xét với mức gia tốc hãm phù hợp, và hệ số luồn dây của chúng.
Trong mọi trường hợp, giá trị gia tốc hãm không được lấy nhỏ hơn:
- 0,5 m/s2, trong trường hợp bình thường;
- giá trị tối thiểu của gia tốc hãm để giảm tốc độ cabin và đối trọng, không được vượt quá giá trị được thiết kế cho bộ giảm chấn, trong trường hợp giảm chấn hành trình ngắn.
5.11.2.2.3 Trường hợp cabin/đối trọng ngừng chuyển động
Hệ số T1/T2 tĩnh được tính toán cho cabin không tải ở vị trí thấp nhất và cao nhất.
5.11.2.3 Tính toán hệ số ma sát
5.11.2.3.1 Các kiểu rãnh pu li ma sát
5.11.2.3.1.1 Rãnh nửa hình tròn hoặc nửa hình tròn xẻ rãnh đáy (rãnh chữ “U”)
CHÚ DẪN:
β góc chắn phần cắt rãnh đáy;
γ góc mở của rãnh puli.
Hình 6 - Rãnh nửa hình tròn, xẻ rãnh đáy
|
Công thức sau được sử dụng: |
|
trong đó:
β là góc chắn phần cắt rãnh đáy;
γ là góc mở của rãnh puli;
µ là hệ số ma sát;
f là hệ số ma sát tương đương.
Giá trị lớn nhất của góc β không được vượt quá 105° (1,83 rad).
Góc mở của rãnh puli γ được cho bởi nhà sản xuất, tùy thuộc vào việc thiết kế rãnh. Trong mọi trường hợp góc này không được nhỏ hơn 25° (0,44 rad).
5.11.2.3.1.2 Rãnh chữ V
Khi rãnh puli không được tôi cứng, để hạn chế tình trạng lực kéo bị giảm do mài mòn, cần khoét thêm phần đáy rãnh.
CHÚ DẪN
β góc chắn phần cắt rãnh đáy;
γ góc mở của rãnh puli.
Hình 7 - Rãnh chữ V
Công thức sau được sử dụng:
- trong trường hợp chất tải cho cabin hoặc phanh khẩn cấp:
|
|
dùng cho rãnh không được tôi cứng; |
|
|
dùng cho rãnh được tôi cứng; |
- trường hợp đối trọng ngừng chuyển động:
|
|
dùng cho rãnh được tôi cứng và không được tôi cứng |
trong đó:
β là góc chắn phần cắt rãnh đáy;
γ là góc mở của rãnh puli;
µ là hệ số ma sát;
f là hệ số ma sát tương đương.
Giá trị lớn nhất của góc β không được vượt quá 105 ° (1,83 rad). Trong mọi trường hợp góc γ không được nhỏ hơn 35° đối với thang máy.
5.11.2.3.2 Lưu ý về hệ số ma sát
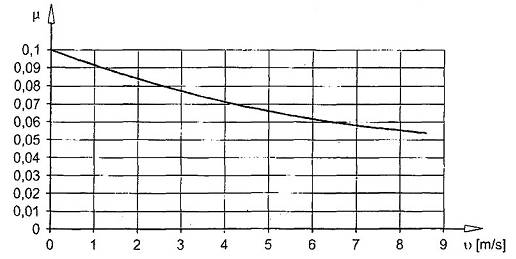
Hình 8 - Hệ số ma sát nhỏ nhất
Áp dụng các giá trị sau:
- Trường hợp chất tải cho cabin: µ = 0,1 ;
|
- Trường hợp phanh khẩn cấp: |
|
- Trường hợp đối trọng bị ngừng chuyển động: µ = 0,2
trong đó:
µ là hệ số ma sát;
v là tốc độ của cáp ứng với tốc độ định mức của cabin.
5.11.3 Công thức cho trường hợp tổng quát
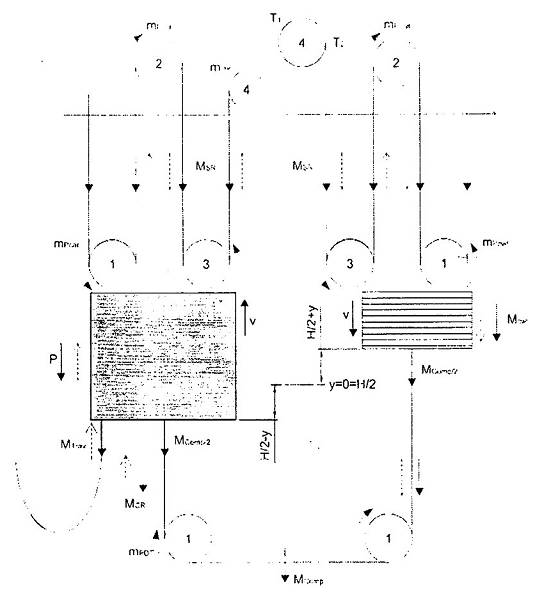
CHÚ DẪN:
1,2, 3,4 là hệ số tốc độ của puli (ví dụ: 2 = 2 · vcar).
Hình 9 - Trường hợp tổng quát
Áp dụng công thức sau:
a) Đối với máy kéo nằm phía trên:
b) Đối với máy kéo nằm phía dưới:
CHÚ THÍCH 1: Công thức trên có thể áp dụng cho cabin không tải bằng cách bỏ bớt Q. Trong trường hợp này T1 sẽ thành T2 và T2 thành T1.
Trong công thức trên ký hiệu ± và ![]() được sử dụng theo cách
sau: toán tử nằm phía trên áp dụng cho trường hợp cabin với tải định mức đang
giảm tốc theo chiều xuống và toán từ nằm phía dưới dùng cho trường hợp cabin
không tải đang giảm tốc theo chiều đi lên. Các trường hợp như khi chất tải cho
cabin hoặc khi cabin ngừng chuyển động thì a = 0
được sử dụng theo cách
sau: toán tử nằm phía trên áp dụng cho trường hợp cabin với tải định mức đang
giảm tốc theo chiều xuống và toán từ nằm phía dưới dùng cho trường hợp cabin
không tải đang giảm tốc theo chiều đi lên. Các trường hợp như khi chất tải cho
cabin hoặc khi cabin ngừng chuyển động thì a = 0
Khi chất tải cho cabin thì Q sẽ được thay thế bằng 1,25 Q cộng với trọng lượng của thiết bị chất dỡ hàng nếu được sử dụng đối với loại thang máy chở người và hàng.
Lực ma sát FRcar và FRcwt nên được bỏ đi trong mọi trường hợp nếu một lực ma sát tối thiểu không được đảm bảo.
CHÚ THÍCH 2: Xem Phụ lục D cho ví dụ tính toán.
Các điều kiện:
l dùng cho bất kỳ puli đổi hướng nào nằm cùng phía cabin;
ll dùng cho bất kỳ puli đổi hướng nào nằm cùng phía đối trọng;
III chỉ khi treo cáp với bội suất palăng > 1;
trong đó:
a là gia tốc hãm phanh (giá trị dương) của cabin, tính bằng mét trên giây bình phương;
FRcar là lực ma sát trong hố thang (hiệu suất của ổ trục phía cabin và ma sát trên ray dẫn hướng,...), tính bằng Newton;
FRcwt là lực ma sát trong hố thang (hiệu suất của ổ trục phía đối trọng và ma sát trên ray dẫn hướng,...), tính bằng Newton;
gn là gia tốc trọng trường chuẩn khi rơi tự do, tính bằng mét trên giây bình phương;
H là độ cao hành trình, tính bằng mét;
iPcar là số lượng puli phía cabin có cùng tốc độ quay vpulley (không tính puli đổi hướng);
iPcwt là số lượng puli phía đối trọng có cùng tốc độ quay vpulley (không tính puli đổi hướng);
iPTD là số lượng puli của thiết bị căng cáp;
mDP là khối lượng quy đổi
(liên quan đến cabin/đối trọng) của puli đổi hướng phía cabin và/hoặc phía đối
trọng ![]() , tính bằng
kilôgam;
, tính bằng
kilôgam;
mPcar là khối lượng quy đổi
(liên quan đến cabin) của puli đổi hướng phía cabin ![]() , tính bằng kilôgam;
, tính bằng kilôgam;
mPcwt là khối lượng quy đổi
(liên quan đến đối trọng) của puli đổi hướng phía đối trọng ![]() , tính bằng kilôgam;
, tính bằng kilôgam;
mPTD là khối lượng quy đổi (liên quan đến cabin/đối trọng) của một puli trên thiết bị căng cáp JPTD/R2, tính bằng kilôgam;
MComp là khối lượng của thiết bị căng cáp bao gồm cả khối lượng các puli, tính bằng kilôgam;
MCR là khối lượng thực tế của cáp/xích bù ([0,5 • H ± y] • nc • khối lượng cáp/đơn vị chiều dài), tính bằng kilôgam;
MCRcar là khối lượng MCR phía cabin;
MCRcwt là khối lượng MCR phía đối trọng;
Mcwt là khối lượng của đối trọng bao gồm khối lượng puli, tính bằng kilôgam;
MSR là khối lượng thực tế của cáp treo ([0,5 • H ± y] • ns • khối lượng cáp/đơn vị chiều dài), tính bằng kilôgam;
MSRcar là khối lượng MSR ở phía cabin;
Trong trường hợp máy kéo đặt phía dưới, cáp nối từ máy kéo đến (các) puli ở đỉnh giếng là MSR1car và cáp nối từ (các) puli ở đỉnh giếng đến cabin là MSR2car (MSR2car = 0 nếu cabin ở tầng cao nhất);
MSRcwt là khối lượng MSR ở phía đối trọng;
Trong trường hợp máy kéo đặt phía dưới, cáp nối từ máy kéo đến (các) puli ở đỉnh giếng là MSR1cwt và cáp nối từ (các) puli ở đỉnh giếng đến cabin là MSR2cwt (MSR2cwt = 0 nếu đối trọng ở tầng cao nhất);
MTrav là khối lượng thực tế của cáp động ([0,25 • H ± 0,5y] • nt • khối lượng cáp/đơn vị chiều dài), tính bằng kilôgam;
nc là số lượng cáp/xích bù;
ns là số lượng cáp treo;
nt là số lượng cáp động;
P là khối lượng cabin không tải, tính bằng kilôgam;
Q là tải định mức của thang máy, tính bằng kilôgam;
T1, T2 là lực tác động lên cáp, tính bằng Newton;
r là bội suất palăng treo cáp;
vpulley là tốc độ quay của puli (tốc độ cáp), tính bằng mét trên giây;
y ở độ cao 0,5 • H → y = 0, tính bằng mét;
→ là tải tĩnh;
- → là tải động;
5.12 Tính toán hệ số an toàn cáp treo cho thang máy điện
5.12.1 Yêu cầu chung
Trên cơ sở viện dẫn các yêu cầu trong các tiêu chuẩn yêu cầu sử dụng tiêu chuẩn này, ví dụ TCVN 6396-20 (EN 81-20), 5.5.2.2, điều khoản này mô tả phương pháp xác định hệ số an toàn “Sf” cho cáp treo. Phương pháp này chỉ sử dụng cho:
- Puli máy dẫn động làm từ thép hoặc gang;
- Dây cáp thép theo EN 12385-5;
CHÚ THÍCH: Phương pháp này căn cứ trên tuổi thọ của cáp đủ dài, với giả định rằng việc bảo dưỡng và kiểm tra diễn ra thường xuyên.
5.12.2 Số lượng puli ma sát tương đương Nequiv
5.12.2.1 Yêu cầu chung
Số lần uốn và mức độ nguy hại của mỗi lần uốn là nguyên nhân làm hư hỏng cáp. Mức độ nguy hại này phụ thuộc vào bị ảnh hưởng bởi hình dạng của rãnh puli (rãnh hình chữ U hay chữ V) và cáp có bị uốn theo chiều ngược lại hay không.
Mức độ nguy hại ở mỗi lần uốn được tính quy đổi về số lần uốn đơn.
Mỗi lần uốn đơn được định nghĩa tương ứng với trường hợp cáp vòng qua puli có rãnh nửa vòng tròn với bán kính rãnh không vượt quá 0,53 lần đường kính danh nghĩa của cáp.
Số lượng lần uốn đơn tương ứng với số puli ma sát tương đương Nequiv, có thể xác định từ công thức:
Nequiv = Nequiv(t) + Nequiv(p)
trong đó:
Nequiv(t) là số puli ma sát tương đương;
Nequiv(p) là số puli dẫn hướng tương đương.
5.12.2.2 Tính toán Nequiv(t)
Giá trị của Nequiv(t) có thể lấy từ Bảng 2.
Bảng 2 - Tính toán số lượng puli ma sát tương đương Nequiv(t)
|
Rãnh chữ V |
Góc chữ V (γ) |
35° |
36° |
38° |
40° |
42° |
45° |
50° |
|
Nequiv(t) |
18,5 |
16 |
12 |
10 |
8 |
6,5 |
5 |
|
|
Rãnh chữ U xẻ đáy |
Góc chữ U (β) |
75° |
80° |
85o |
90o |
95° |
100° |
105° |
|
Nequiv(t) |
2,5 |
3,0 |
3,8 |
5,0 |
6,7 |
10,0 |
15,2 |
Với rãnh chữ U không xẻ đáy: Nequiv(t) = 1.
Giá trị cho các góc không có trong bảng trên có thể xác định bằng phép nội suy tuyến tính.
5.12.2.3 Tính toán Nequiv(p)
Một lần uốn chỉ được xem là uốn ngược chiều nếu khoảng cách từ điểm tiếp xúc của cáp trên hai puli cạnh nhau (khoảng cách giữa các trục puli này là cố định) nhỏ hơn 200 lần đường kính cáp và mặt phẳng uốn được xoay hơn 120°.
Nequiv(p) = Kp • (Nps + 4 • Npr)
trong đó:
Nps là số puli uốn xuôi;
Npr là số puli uốn ngược;
Kp là hệ số phụ thuộc vào tỷ số giữa đường kính puli ma sát và đường kính trung bình các puli.
với: 
trong đó:
Dt là đường kính puli máy ma sát;
Dp là đường kính trung bình của tất cả puli, ngoại trừ puli ma sát.
CHÚ THÍCH: Ví dụ về tính toán số lượng puli tương đương được cung cấp ở Phụ lục E.
5.12.3 Hệ số an toàn
Với thiết kế cho trước của dẫn động cáp, giá trị nhỏ nhất của hệ số an toàn có thể được chọn từ Hình 10, trong đó có tính đến tỷ lệ thực tế D1/dr và giá trị Nequiv tính cho trường hợp xấu nhất của cáp.
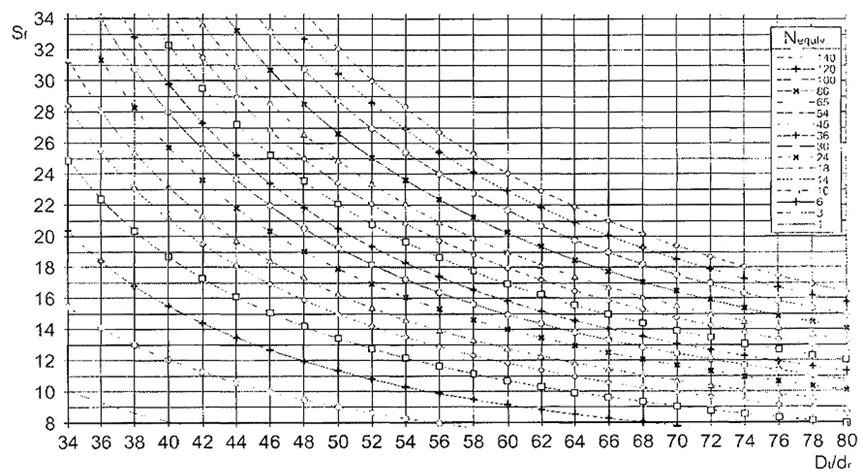 Hình 10 - Tính toán giá trị nhỏ
nhất của hệ số an toàn
Hình 10 - Tính toán giá trị nhỏ
nhất của hệ số an toàn
Đường cong của Hình 10 được tính dựa vào công thức sau:
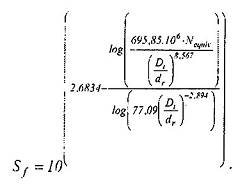
trong đó:
Dt là đường kính puli ma sát;
dr là đường kính cáp;
Nequiv là số lượng puli tương đương;
St là hệ số an toàn;
5.13 Tính toán pít tông, xy lanh, ống dẫn cứng và phụ tùng nối ống
5.13.1 Tính toán khả năng chống quá áp suất
5.13.1.1 Tính toán độ dầy thành của pít tông, xy lanh, ống dẫn cứng và phụ tùng nối ống
|
|
e0 = 1,0 mm đối với thành và đế của các xy lanh và ống dẫn cứng giữa xy lanh và van ngắt, nếu có; e0 = 0,5 mm đối với các pít tông và các ống cứng khác; 2,3 là hệ số tính đến các tổn thất do ma sát (1,15) và các giá trị đỉnh của áp suất (2); 1,7 là hệ số an toàn đối với ứng suất thử. Hình 11 - Tính toán độ dầy thành |
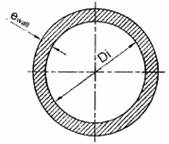
5.13.1.2 Tính toán chiều dầy đế của xy lanh (các ví dụ)
5.13.1.2.1 Yêu cầu chung
Các ví dụ trình bày bên dưới không loại trừ việc có thể có các kết cấu khác.
5.13.1.2.2 Đế phẳng có rãnh giảm tải
|
|
Các điều kiện để giảm ứng suất của mối hàn: r1 ≥ 0,2 • e1 và r1 ≥ 5 mm u1 ≤ 1,5 • s1 h1 ≥ u1 + r1
|
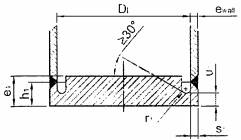
![]()
|
Hình 12 - Đế phẳng có rãnh giảm tải |
|
5.13.1.2.3 Đế có độ cong
|
|
Các điều kiện: h2 ≥ 3,0 • e2 r2 ≥ 0,15 • D R2 = 0,8 • D
|
|
Hình 13 - Đế có độ cong |
|
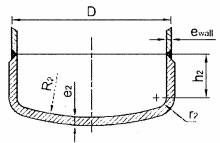
5.13.1.2.4 Đế phẳng có gờ hàn
|
|
Các điều kiện: u3 ≥ e3 + r3
|
|
Hình 14 - Đế phẳng có gờ hàn |
|
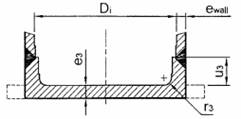
5.13.2 Tính toán khả năng chống uốn dọc của xy lanh pit tông
5.13.2.1 Yêu cầu chung
Tính toán uốn dọc phải được thực hiện trên bộ phận có khả năng chống uốn dọc nhỏ nhất.
5.13.2.2 Xy lanh pít tông tác động đơn
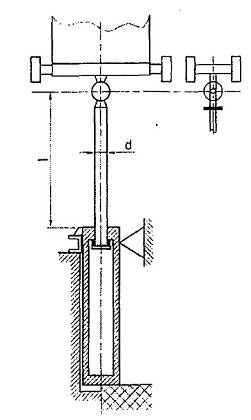
Hình 15 - Xy lanh- pít tông tác động đơn
|
Đối với λn ≥ 100:
|
Đối với λn < 100:
|
4)Fs = 1,4 • gn •[cm •(P+Q)+0,64 • Pr + Prh]
5.13.2.3 Kích dạng ống lồng không có dẫn hướng bên ngoài, tính toán pít tông
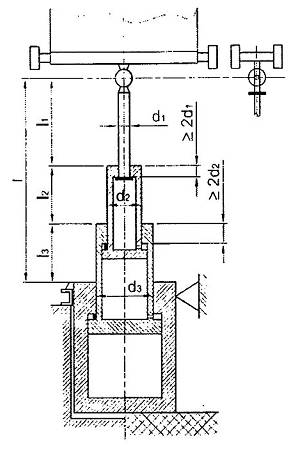
Hình 16 - Kích dạng ống lồng không có dẫn hướng bên ngoài
|
l = l1 + l2 + l3, |
l1 = l2 = l3 |
Đối với λe ≥ 100:
Đối với λe < 100:
|
|
|
||
|
(để đơn giản hóa tính toán, giả định rằng: J3 = J2) |
||
|
đối với 2 đoạn: |
|
|
|
φ = 1,25 • v - 0,2 |
cho 0,22 < v < 0,65 |
|
|
đối với 3 đoạn: |
|
|
|
φ = 1,5 • v - 0,2 |
cho 0,22 < v < 0,65 |
|
|
φ = 0,65 • v + 0,35 |
cho 0,65 < v < 1 |
|
5)Fs = 1,4 • gn •[cm •(P+Q)+0,64 • Pr + Pm + Prt]
5.13.2.4 Xy lanh dạng ống lồng có dẫn hướng ngoài
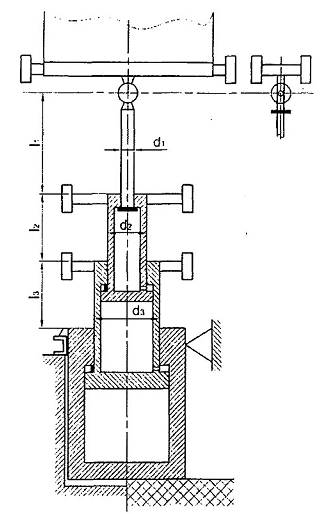
Hình 17 - Kích dạng ống lồng có dẫn hướng ngoài
|
Đối với λn ≥ 100:
|
Đối với λn < 100:
|
6)Fs = 1,4 • gn •[cm •(P+Q)+0,64 • Pr + Prh + Prt]
Ký hiệu: An diện tích mặt cắt ngang phần vật liệu của pít tông, tính bằng milimét vuông (n = 1, 2, 3);
cm là hệ số luồn cáp (bội suất palăng treo cáp);
dm là đường kính ngoài của pít tông lớn nhất của kích dạng ống lồng, tính bằng milimét;
dmi là đường kính trong của pít tông lớn nhất của kích dạng ống lồng, tính bằng milimét;
E mô đun đàn hồi, tính bằng newton trên milimét vuông (đối với thép: E = 2,1 x 105N/mm2);
e0 là độ dầy thêm của vách, tính bằng milimét;
Fs là lực uốn dọc thực tế, tính bằng Newton;
gn là gia tốc trọng trường, tính bằng mét trên giây bình phương;
ie là bán kính quán tính tương đương của xi lanh dạng ống lồng, tính bằng milimét;
in là bán kính quán tính tương đương của pít tông, tính bằng milimét (n = 1, 2, 3);
Jn là mô men quán tính của tiết diện pít tông, tính bằng milimét mũ bốn (n = 1, 2, 3);
l là chiều dài lớn nhất của các pít tông bị uốn dọc, tính bằng milimét;
p là áp suất khi đầy tải, tính bằng megapascal;
P là tổng của khối lượng cabin không tải và khối lượng của phần các cáp động treo với cabin, tính bằng kilôgam;
Pr là khối lượng của pít tông, tính bằng kilôgam;
Prh là khối lượng của thiết bị đầu pít tông, nếu có, tính bằng kilôgam;
Prt là khối lượng của các pít tông tác động lên pít tông được tính toán (trong trường hợp kích dạng ống lồng), tính bằng kilôgam;
Q là tải định mức được ghi trong cabin, tính bằng kilôgam;
Rm là giới hạn độ bền kéo của vật liệu, tính bằng Newton trên milimét vuông;
RP0,2 là ứng suất thử (độ giãn dài không tỷ lệ), tính bằng Newton trên milimét vuông;
λe = ![]() là hệ số độ mảnh tương đương của
kích dang ống lồng;
là hệ số độ mảnh tương đương của
kích dang ống lồng;
λe = ![]() là hệ số độ mảnh của pít tông được
tính toán;
là hệ số độ mảnh của pít tông được
tính toán;
v, φ là các hệ số dùng để biểu thị các giá trị gần đúng được cho bởi các biểu đồ thực nghiệm;
1,4 là hệ số quá áp;
2 là hệ số an toàn chống uốn dọc.
5.14 Thử va đập bằng quả lắc
5.14.1 Yêu cầu chung
Các thử nghiệm va đập bằng quả lắc được thực hiện theo những quy định sau.
CHÚ THÍCH: Thử nghiệm va đập bằng quả lắc có thể áp dụng cho một dãy loại cửa, chẳng hạn dựa trên loại và kích thước nhỏ nhất/lớn nhất.
5.14.2 Thiết bị thử nghiệm
5.14.2.1 Thiết bị quả lắc cứng
Thiết bị quả lắc cứng phải có phần thân như Hình 18. Phần thân này bao gồm vòng va đập làm từ thép S235JR, theo EN 10025 và phần giá chế tạo từ thép E 295, theo EN 10025. Tổng khối lượng của phần thân đạt đến mức 10 kg ± 0,01 kg bằng cách đổ vào các viên bi chì có đường kính 3,5 mm ± 0,5 mm.
5.14.2.2 Thiết bị quả lắc mềm
Thiết bị quả lắc mềm có dạng như một cái túi đựng đạn nhỏ như Hình 19, được làm bằng da, bên trong đựng các viên bi chì có đường kính 3,5 mm ± 0,5 mm để đạt đến tổng khối lượng 45 kg ± 0,5 kg.
5.14.2.3 Treo thiết bị quả lắc
Thiết bị quả lắc được treo bằng dây cáp đường kính khoảng 3 mm sao cho khoảng cách theo chiều ngang từ điểm ngoài cùng của quả lắc đến tấm vách cần thử không vượt quá 15 mm ± 10mm.
Chiều dài quả lắc (đo từ điểm dưới của móc treo đến điểm tham chiếu của thiết bị tạo va đập) phải ít nhất là 1,5 m.
5.14.2.4 Thiết bị kéo và thả
Thiết bị quả lắc phải được đung đưa tác động vào tấm phải thử bằng thiết bị kéo và thả, được đưa lên độ cao thả rơi tự do theo yêu cầu ở 5.14.3.2 và 5.14.3.3. Thiết bị thả không được tạo thêm các xung động tác động vào quả lắc tại thời điểm thả quả lắc.
Cáp treo phải được móc vào thiết bị tạo va đập sao cho không tạo ra bất kỳ mô men xoắn nào nhằm tránh cho thiết bị khỏi bị xoay tròn khi được thả.
Trước khi thả thiết bị, cáp treo phải được kéo thẳng khi nằm ở vị trí nơi thiết bị tạo va đập sẽ được thả; khi đó móc treo dạng tam giác sẽ giữ cho trọng tâm của thiết bị tạo va đập thẳng hàng với cáp kéo tại vị trí thả thiết bị.
5.14.2.5 Mẫu thử
5.14.2.5.1 Các mẫu thử phải hoàn chỉnh và có kích thước như đã định và lắp ráp theo đúng mô tả của ứng dụng cụ thể. Các mẫu thử phải được lắp cố định vào khung thử nghiệm sao cho tại các điểm lắp ghép không có sự biến dạng dưới các điều kiện thử nghiệm (lắp đặt chắc chắn).
5.14.2.5.2 Các mẫu thử sử dụng cho thử nghiệm phải là sản phẩm sản xuất hoàn thiện (gờ gia công, lỗ,...).
5.14.3 Thử nghiệm
5.14.3.1 Các thử nghiệm phải được tiến hành ở nhiệt độ 23 °C ± 5 °C. Các tấm thử nghiệm phải được đặt trực tiếp ở mức nhiệt độ này trong ít nhất 4 h trước khi thử nghiệm.
5.14.3.2 Thử nghiệm với thiết bị quả lắc va đập cứng khi tiến hành phải được sử dụng cùng với thiết bị theo mô tả ở 5.14.2.1 với độ cao thả rơi và được bố trí thử nghiệm như trong Hình 18 và Hình 20.
5.14.3.3 Thử nghiệm với thiết bị quả lắc va đập mềm khi tiến hành phải được sử dụng cùng với thiết bị theo mô tả ở 5.14.2.1 với độ cao thả rơi và được bố trí thử nghiệm như trong Hình 19 và Hình 20.
5.14.3.4 Thiết bị con lắc va đập phải được đưa về độ cao thả rơi được yêu cầu, tuân theo tiêu chuẩn có yêu cầu quá trình thử nghiệm này, ví dụ TVCN 6396-20 (EN 81-20), 5.3.5.3.2, và được thả rơi.
Nếu không thể va vào điểm va đập của phần phù hợp trên mẫu thử (ví dụ độ rộng tấm vách nhỏ hơn 240 mm), thiết bị con lắc va đập phải va vào điểm va đập càng gần càng tốt (xem các yêu cầu trình bày trong các tiêu chuẩn có yêu cầu sử dụng sử dụng tiêu chuẩn này, ví dụ TCVN 6396-20 (EN 81-20).
5.14.3.5 Với mỗi thiết bị được yêu cầu trong 5.14.2.1 và 5.14.2.2 chỉ cần thực hiện một lần thử cho mỗi điểm va đập.
Nếu cùng tiến hành thử cả bằng quả lắc va đập cứng và quả lắc va đập mềm thì cả hai phải được thực hiện trên cùng mẫu thử và thử bằng quả lắc cứng phải thực hiện trước.
5.14.3.6 Cửa tầng phải được thử từ phía ngoài tầng. Cửa cabin và vách cabin phải được thử nghiệm tử bên trong cabin.
5.14.4 Diễn giải kết quả
Phải tiến hành kiểm tra sau khi thử tương ứng với tiêu chuẩn yêu cầu việc thử này theo các nội dung sau:
a) không còn nguyên vẹn;
b) biến dạng dư;
c) nứt hoặc mẻ.
5.14.5 Báo cáo kết quả thử
Báo cáo phải bao gồm ít nhất các thông tin sau:
a) tên và địa chỉ của tổ chức tiến hành thử;
b) ngày tiến hành thử;
c) kích thước và kết cấu tấm thử;
d) các liên kết cố định của tấm thử;
e) độ cao rơi tự do (của quả lắc) khi thử;
f) số lần thử;
g) kết quả thử;
h) chữ ký của người có trách nhiệm tiến hành thử.
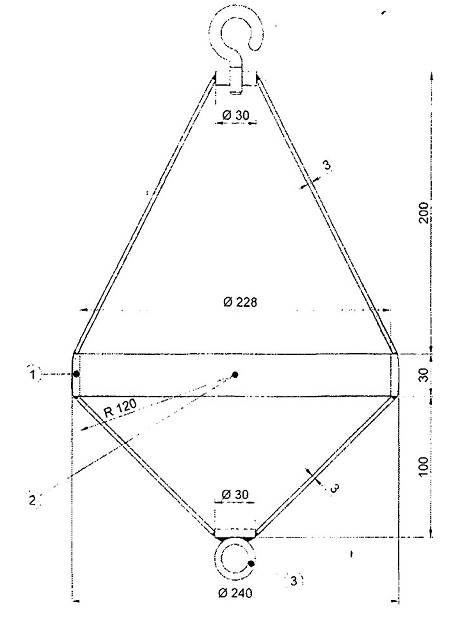
CHÚ DẪN
![]() vòng va đập
vòng va đập
![]() điểm tham chiếu để đo độ cao thả rơi quả lắc
điểm tham chiếu để đo độ cao thả rơi quả lắc
![]() khoen để nối với thiết bị thả
khoen để nối với thiết bị thả
Hình 18 - Thiết bị va đập quả lắc cứng
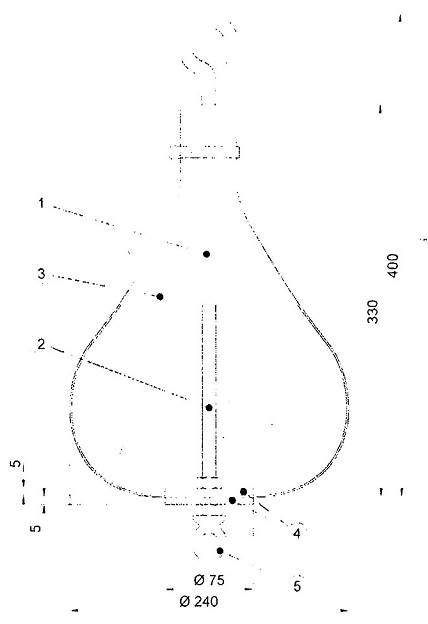
CHÚ DẪN:
![]() thanh vít
thanh vít
![]() điểm tham chiếu để đo độ cao thả rơi quả lắc
trong mặt phẳng của đường kính lớn nhất
điểm tham chiếu để đo độ cao thả rơi quả lắc
trong mặt phẳng của đường kính lớn nhất
![]() túi da
túi da
![]() đĩa thép
đĩa thép
![]() khoen để nối với thiết bị thả
khoen để nối với thiết bị thả
Hình 19 - Thiết bị va đập quả lắc mềm
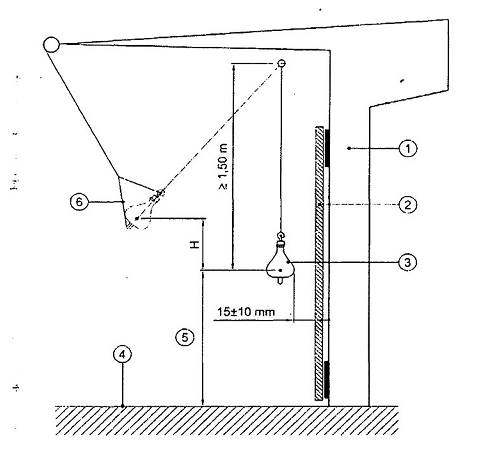
CHÚ DẪN
![]() khung
khung
![]() cửa hoặc thành phần vách cabin phải thử
cửa hoặc thành phần vách cabin phải thử
![]() thiết bị tạo va đập
thiết bị tạo va đập
![]() mặt sàn tầng tương ứng với cửa hoặc cấu trúc
vách cabin cần thử
mặt sàn tầng tương ứng với cửa hoặc cấu trúc
vách cabin cần thử
![]() độ cao điểm va đập: giá trị độ cao của điểm
va đập được cho trong mục tương ứng
độ cao điểm va đập: giá trị độ cao của điểm
va đập được cho trong mục tương ứng
![]() cấu trục móc dạng tam giác như xem xét ở
5.14.2.4
cấu trục móc dạng tam giác như xem xét ở
5.14.2.4
H chiều cao rơi tự do
Hình 20 - Chiều cao rơi tự do của thiết bị thử nghiệm
5.15 Các bộ phận điện tử - Loại trừ lỗi sự cố
Việc loại trừ các lỗi sự cố chỉ được xem xét khi các bộ phận được sử dụng trong giới hạn xấu nhất của chúng về các đặc tính, giá trị, nhiệt độ, độ ẩm, điện áp và dao động.
Bảng 3 sau đây mô tả các điều kiện mà đó có thể được loại trừ một số lỗi nhất định.
Bảng 3 - Loại trừ các hư hỏng
|
Bộ phận |
Loại |
Điều kiện |
Ghi chú |
|||||
|
Hở mạch |
Ngắn mạch |
Tăng lên giá trị cao hơn |
Giảm xuống giá trị thấp hơn |
Thay đổi chức năng |
||||
|
1. Các linh kiện thụ động |
|
|
|
|
|
|
|
|
|
1.1 Điện trở cố định |
KHÔNG |
(a) |
KHÔNG |
(a) |
|
(a) Chỉ cho điện trở màng được phủ hoặc bịt kín, nối dọc trục tuân thủ theo các IEC hiện hành, và loại điện trở quấn dây một lớp được bảo vệ bằng phủ men hoặc bọc kín. |
|
|
|
1.2 Biến trở |
KHÔNG |
KHÔNG |
KHÔNG |
KHÔNG |
|
|
|
|
|
1.3 Điện trở phi tuyến NTC, PTC, VDR, IDR |
KHÔNG |
KHÔNG |
KHÔNG |
KHÔNG |
|
|
|
|
|
1.4 Tụ điện |
KHÔNG |
KHÔNG |
KHÔNG |
KHÔNG |
|
|
|
|
|
1.5 Các linh kiện cảm ứng - cuộn cảm ứng - cuộn cảm kháng |
KHÔNG |
KHÔNG |
|
KHÔNG |
|
|
|
|
|
2. Linh kiện bán dẫn |
|
|
|
|
|
|
|
|
|
2.1 Điốt, LED |
KHÔNG |
KHÔNG |
|
|
KHÔNG |
|
Chức năng hoạt động thay đổi liên quan đến sự thay đổi giá trị của dòng ngược. |
|
|
2.2 Điốt Zener |
KHÔNG |
KHÔNG |
|
KHÔNG |
KHÔNG |
|
Giá trị giảm xuống mức thấp hơn liên quan đến sự thay đổi điện áp Zener. Chức năng hoạt động thay đổi liên quan đến sự thay đổi giá trị của dòng ngược. |
|
|
2.3 Thyristor, Triac, GTO |
KHÔNG |
KHÔNG |
|
|
KHÔNG |
|
Chức năng hoạt động thay đổi liên quan đến hiện tượng tự kích hoạt hoặc khóa của linh kiện |
|
|
2.4 Bộ ghép quang |
KHÔNG |
(a) |
|
|
KHÔNG |
(a) Có thể được loại trừ với điều kiện bộ ghép quang tuân theo EN 60747-5-5, và điện áp cách ly ít nhất phải theo bảng bên dưới, EN 60664-1:2007, Bảng F.1. |
Hở mạch có nghĩa là một trong hai linh kiện cơ bản (LEO và quang trở) có bị hở mạch. Ngắn mạch có nghĩa là có sự chập mạch giữa hai linh kiện này. |
|
|
Điện áp pha-đất từ điện áp định mức của hệ thống và bao gồm Vrms và d.c. 50 100 150 300 600 1000 |
Dãy giá trị nên dùng của xung chịu điện áp tính bằng volt khi lắp đặt |
|||||||
|
Nhóm III |
||||||||
|
800 1500 2500 4000 6000 8000 |
||||||||
|
2.5 Mạch lai |
KHÔNG |
KHÔNG |
KHÔNG |
KHÔNG |
KHÔNG |
|
|
|
|
2.6 Mạch tích hợp |
KHÔNG |
KHÔNG |
KHÔNG |
KHÔNG |
KHÔNG |
|
Chức năng hoạt động thay đổi liên quan đến dao động, các cổng “and” trở thành cổng “or”,... |
|
|
3 Các linh kiện khác |
|
|
|
|
|
|
|
|
|
3.1 Đầu nối Thiết bị đầu cuối Phích cắm |
KHÔNG |
(a) |
|
|
|
(a) Việc ngắn mạch ở các đầu nối có thể được loại trừ nếu các giá trị cực tiểu tuân thủ theo bảng (lấy từ EN 60664-1) với điều kiện sau: - cấp độ ô nhiễm 3; - vật liệu nhóm III; - trường không đồng nhất. Cột “vật liệu bảng mạch” ở Bảng F.4 không sử dụng. Giá trị cực tiểu tuyệt đối có thể tìm thấy trên các phần tử kết nối, không phải kích thước bước hoặc giá trị lý thuyết. Nếu đầu nối được bảo vệ với vật liệu cấp độ IP 5X hoặc tốt hơn thì có thể giảm về giá trị khe hở không khí, ví dụ 3 mm cho điện áp 250 Vrms. |
|
|
|
3.1 Bóng đèn nê-ông |
KHÔNG |
KHÔNG |
|
|
|
|
|
|
|
3.3 Biến áp |
KHÔNG |
(a) |
(b) |
(b) |
|
(a) (b) Có thể loại trừ với điều kiện biến áp tuân theo EN 61558-1:2005, Điều 18 áp dụng cho cách điện đôi hay cách điện tăng cường giữa các cuộn dây và giữa các cuộn dây và lõi. |
Ngắn mạch bao gồm cả ở trong cuộn sơ cấp và cuộn thứ cấp, hoặc giữa các vòng dây sơ cấp và thứ cấp. Sự thay đổi giá trị có nghĩa là thay đổi tỉ số biến áp do ngắn mạch cục bộ trong cuộn dây. |
|
|
3.4 Cầu chì |
|
(a) |
|
|
|
(a) Có thể loại trừ nếu cầu chì được xếp loại đúng và có cấu tạo theo các IEC hiện hành. |
Ngắn mạch có nghĩa là ngắn mạch đối với cầu chì đã bị đứt. |
|
|
3.1 Rơle |
KHÔNG |
(a) (b) |
|
|
|
(a) Ngắn mạch giữa các tiếp điểm, và giữa các tiếp điểm và cuộn cảm có thể được loại trừ nếu rơle đáp ứng các yêu cầu của các tiêu chuẩn yêu cầu sử dụng tiêu chuẩn này (ví dụ TCVN 6396-20 (EN 81-20), 5.10.3.2.2). (b) Việc hàn của các tiếp điểm không thể loại trừ. Tuy nhiên, nếu rơle được chế tạo với các tiếp điểm khóa cài tác động bằng cơ học, đồng thời tuân thủ theo EN 60947-5-1, các giả định được trình bày trong các tiêu chuẩn yêu cầu sử dụng tiêu chuẩn này sẽ được áp dụng (ví dụ TCVN 6396-20 (EN 81-20), 5.10.3.1.2 và 5.10.3.1.3). |
|
|
|
3.6 Bảng mạch in (PCB) |
KHÔNG |
(a) |
|
|
|
(a) Ngắn mạch được loại trừ nếu: - thông số kỹ thuật tổng quát của PCB tuân thủ theo EN 62326-1; - vật liệu bảng mạch tuân thủ theo đặc tính của EN 61249; - PCB được chế tạo theo các yêu cầu trên và giá trị nhỏ nhất tuân thủ theo các bảng (EN 60664-1) với các điều kiện sau: - cấp độ nhiễm 3; - vật liệu nhóm III; - trường không đồng nhất. Cột “vật liệu bảng mạch” ở Bảng 4 không sử dụng. Điều đó có nghĩa là khe hở phóng điện là 4 mm và khe hở không khí là 3mm ở độ cao 2000 m cho điện áp 250 Vrms. Với điện áp và độ cao khác cần tham khảo EN 60664-1. Nếu PCB được bảo vệ với vật liệu cấp độ IP 54 hoặc tốt hơn, và phía mặt in được phủ một lớp chống lão hóa hoặc lớp bảo vệ che phủ tất cả đường dẫn và đối với lớp bên trong của bảng mạch PCB nhiều lớp, cấp độ ô nhiễm 2 có thể được sử dụng. CHÚ THÍCH: Thực tế cho thấy lớp phủ xanh (solder mask) hoàn toàn có thể đáp ứng được vai trò của một lớp bảo vệ. Với các bảng mạch nhiều lớp bao gồm ít nhất 3 lớp sợi thủy tinh tẩm nhựa (prepreg) hoặc các tấm vật liệu cách điện khác, có thể loại trừ ngắn mạch (xem EN 60950-1:2006. 2.10.6.4). |
|
|
|
4 Lắp ráp các linh kiện trên bảng mạch in (PCB) |
KHÔNG |
(a) |
|
|
|
(a) Ngắn mạch có thể được loại trừ trong trường hợp ngắn mạch của bản thân các linh kiện được loại trừ và các linh kiện được lắp sao cho khe hở phóng điện và khe hở không khí không nhỏ hơn giá trị nhỏ nhất có thể chấp nhận như liệt kê ở 3.1 và 3.6 của bảng này, không phụ thuộc vào kỹ thuật lắp các linh kiện hay bản thân bảng mạch. |
|
|
|
CHÚ THÍCH: Các ô có ký hiệu “KHÔNG” có nghĩa là: lỗi không được loại trừ, tức là phải được xem xét; Các ô không có ký hiệu có nghĩa là: loại lỗi được xác định không phù hợp. |
||||||||
5.16 Yêu cầu về thiết kế hệ thống điện tử lập trình được (PESSRAL)
Các hệ thống điện tử lập trình được phải tuân thủ theo các yêu cầu tối thiểu về các chức năng an toàn phổ biến SIL như liệt kê trong Phụ lục B, Bảng B.1, B.2 và B.3. Ngoài ra các phép đo cụ thể được yêu cầu cho SIL 1, 2 và 3 được liệt kê tương ứng trong Phụ lục B, Bảng B.4, B.5 và B.6.
Xem thêm các yêu cầu trong các tiêu chuẩn yêu cầu sử dụng tiêu chuẩn này.
CHÚ THÍCH: Các điều của EN 61508-7:2010 liệt kê từ Bảng B.1 đến B.6 liên quan đến các yêu cầu tương ứng trong EN 61508-2:2010 và EN 61508-3:2010.
Phụ lục A
(quy định)
Giấy chứng nhận thử nghiệm mẫu
Giấy chứng nhận thử nghiệm mẫu phải bao gồm các nội dung sau.
GIẤY CHỨNG NHẬN THỬ NGHIỆM MẪU
Tên đơn vị thử nghiệm...........................................................................................................
Mẫu thử nghiệm số................................................................................................................
1 Loại mẫu và nhãn hiệu.........................................................................................................
2 Tên và địa chỉ nhà sản xuất..................................................................................................
.............................................................................................................................................
3 Tên và địa chỉ của cơ sở sở hữu chứng nhận.......................................................................
4 Ngày nộp hồ sơ xin thử nghiệm............................................................................................
5 Chứng nhận được cấp trên cơ sở các yêu cầu sau...............................................................
.............................................................................................................................................
6 Đơn vị thử nghiệm...............................................................................................................
7 Ngày và số hiệu báo cáo thử nghiệm....................................................................................
8 Ngày tiến hành thử nghiệm..................................................................................................
9 Các tài liệu mang số hiệu thử nghiệm như ở trên, được đính kèm theo giấy chứng nhận này...
.............................................................................................................................................
10 Thông tin khác...................................................................................................................
.............................................................................................................................................
Địa điểm ……………………………………….(Ngày)..................................................................
Tên và chức vụ người ký giấy chứng nhận..............................................................................
(Chữ ký)................................................................................................................................
Phụ lục B
(quy định)
Hệ thống điện tử lập trình được liên quan đến an toàn áp dụng cho thang máy
(PESSRAL)
B.1 Phép đo thông dụng
Bảng B.1 - Phép đo thông dụng để tránh và phát hiện lỗi - Thiết kế phần cứng
|
STT |
Đối tượng |
Phép đo |
Tham khảo EN 61508-7:2010 |
|
1 |
Bộ xử lý |
Sử dụng mạch cảnh báo. |
A.9 |
|
2 |
Lựa chọn linh kiện |
Sử dụng các linh kiện chỉ trong phạm vi thông số kỹ thuật của chúng. |
|
|
3 |
Các cổng vào/ra và giao diện. Các kênh giao tiếp |
Trạng thái an toàn đã xác định trong trường hợp lỗi nguồn hay khởi động lại. |
|
|
4 |
Bộ nguồn |
Trạng thái tắt an toàn được xác định trong trường hợp quá áp hay sụt áp. |
A.8.2 |
|
5 |
Vùng nhớ thay đổi |
Chỉ sử dụng bộ nhớ thể rắn. |
|
|
6 |
Vùng nhớ thay đổi |
Thử đọc/ghi của bộ nhớ chứa dữ liệu biến trong quá trình khởi động. |
|
|
7 |
Vùng nhớ thay đổi |
Chỉ truy cập từ xa đến nguồn dữ liệu về thông tin (ví dụ số liệu thống kê). |
|
|
8 |
Vùng nhớ cố định |
Mã chương trình không thể bị thay đổi, dù là tự động bởi hệ thống hay can thiệp từ xa |
|
|
9 |
Vùng nhớ cố định |
Thử nghiệm bộ nhớ mà chương trình và bộ nhớ dữ liệu cố định trong quá trình khởi động bằng phương pháp, ít nhất là, tương đương với phương pháp kiểm tra tổng. |
A.4.2 |
Bảng B.2 - Phép đo thông dụng để tránh và phát hiện lỗi - Thiết kế phần mềm
|
STT |
Đối tượng |
Phép đo |
Tham khảo EN 61508-7:2010 |
|
1 |
Cấu trúc |
Cấu trúc chương trình (như hệ môđun, xử lý dữ liệu, định nghĩa giao diện) phải theo kỹ thuật mới nhất (xem EN 61508-3). |
B.3.4/C.2.1 C.2.9/C.2.7 |
|
2 |
Quy trình khởi động |
Trong quá trình khởi động phải duy trì trạng thái an toàn cho thang máy. |
|
|
3 |
Ngắt |
Giới hạn sử dụng ngắt: Chỉ sử dụng các ngắt lồng nhau nếu có thể đoán được tất cả các trình tự có thể có của ngắt. |
C.2.6.5 |
|
4 |
Ngắt |
Thủ tục ngắt không kích hoạt mạch cảnh giới ngoại trừ khi kết hợp với các điều kiện trình tự chương trình khác. |
A.9.4 |
|
5 |
Tắt nguồn |
Không có thủ tục tắt nguồn, chẳng hạn để cứu dữ liệu, cho các chức năng liên quan đến an toàn. |
|
|
6 |
Quản lý bộ nhớ |
Trình quản lý ngăn xếp trong phần cứng và/hoặc phần mềm với thủ tục đáp ứng phù hợp. |
C.2.6.4/C.5.4 |
|
7 |
Chương trình |
Vòng lặp ngắn hơn thời gian đáp ứng hệ thống, ví dụ bằng cách giới hạn số vòng lặp hoặc thời gian thực thi việc kiểm tra. |
|
|
8 |
Chương trình |
Kiểm tra offset con trỏ mảng, nếu không có trong ngôn ngữ lập trình được sử dụng. |
C.2.6.6 |
|
9 |
Chương trình |
Xử lý các ngoại lệ (ví dụ phép chia cho 0, tràn bộ nhớ, kiểm tra vùng nhớ tạm,...), là những trường hợp khiến hệ thống chuyển sang trạng thái an toàn. |
|
|
10 |
Chương trình |
Không lập trình đệ quy, ngoại trừ sử dụng trong các thư viện chuẩn đã được chạy thử tốt, trong các hệ điều hành được công nhận, hay trong trình biên dịch bậc cao. Đối với những trường hợp ngoại lệ này, những ngăn xếp riêng dùng cho các tác vụ riêng cũng sẽ được cung cấp và được điều khiển bởi một bộ quản lý bộ nhớ. |
C.2.6.7 |
|
11 |
Chương trình |
Các tài liệu về giao diện thư viện lập trình và hệ điều hành ít nhất phải hoàn chỉnh giống như chính chương trình người sử dụng. |
|
|
12 |
Chương trình |
Kiểm tra độ tin cậy của dữ liệu liên quan đến các chức năng an toàn, ví dụ các mẫu dữ liệu nhập vào, dãy dữ liệu nhập vào, và dữ liệu nội bộ. |
C.2.5/C.3.1 |
|
13 |
Chương trình |
Nếu có chế độ hoạt động nào đó có thể được kích hoạt để thử nghiệm hoặc cho mục đích kiểm tra, thang máy sẽ không được ở trạng thái hoạt động bình thường cho đến khi chế độ đó chấm dứt. |
EN 61508-1:2010 7.7.2.1 |
|
14 |
Hệ thống liên lạc (bên ngoài và bên trong) |
Trường hợp bị mất liên lạc hoặc có lỗi trên hệ thống bus, hệ thống liên lạc phải đạt đến trạng thái an toàn với sự xem xét thích đáng về thời gian đáp ứng của hệ thống trên hệ thống bus liên lạc với các chức năng an toàn. |
A.7/A.9 |
|
15 |
Hệ thống bus |
Không thiết lập lại cấu hình của hệ thống bus CPU, ngoại trừ trong quá trình khởi động. CHÚ THÍCH: Định kỳ làm mới lại (refresh) hệ thống bus CPU sẽ không được xem là thiết lập lại cấu hình. |
C.3.13 |
|
16 |
Xử lý vào/ra |
Không thiết lập lại cấu hình của các cổng vào/ra, ngoại trừ trong quá trình khởi động. CHÚ THÍCH: Định kỳ làm mới lại (refresh) các cổng vào/ra sẽ không được tính là thiết lập lại cấu hình. |
C.3.13 |
Bảng B.3 - Phép đo thông dụng cho quá trình thiết kế và thực hành
|
STT |
Phép đo |
Tham khảo EN 61508-7:2010 |
|
1 |
Đánh giá ứng dụng về các mặt chức năng, môi trường và giao diện |
A.14/B.1 |
|
2 |
Đặc tính kỹ thuật yêu cầu bao gồm các yêu cầu về an toàn |
B.2.1 |
|
3 |
Xem xét tất cả các đặc tính kỹ thuật |
B.2.6 |
|
4 |
Hồ sơ thiết kế như yêu cầu ở 5.6.1 và ngoài ra còn có: - mô tả chức năng bao gồm kiến trúc hệ thống và tương tác phần cứng/phần mềm - tài liệu kỹ thuật về phần mềm bao gồm chức năng và mô tả tiến trình |
C.5.9 |
|
5 |
Báo cáo đánh giá thiết kế |
B.3.7/B.3.8, C.5.16 |
|
6 |
Kiểm tra độ tin cậy, ví dụ bằng phương pháp chế độ lỗi và phân tích hiệu quả (FMEA) |
B.6.6 |
|
7 |
Thông số thử nghiệm của nhà sản xuất, báo cáo thử nghiệm của nhà sản xuất và báo cáo thử nghiệm hiện trường |
B.6.1 |
|
8 |
Tài liệu hướng dẫn bao gồm phạm vi sử dụng |
B.4.1 |
|
9 |
Lặp lại và cập nhật các phép đo đề cập bên trên nếu sản phẩm có thay đổi |
C.5.23 |
|
10 |
Thực hiện việc kiểm tra phiên bản phần cứng, phần mềm và tính tương thích |
C.5.24 |
B.2 Phép đo cụ thể
Bảng B.4 - Phép đo cụ thể theo SIL 1
|
Các bộ phận và chức năng |
Yêu cầu |
Phép đo |
Xem C.3 |
Tham khảo EN 61508-7:2010 |
|
Cấu trúc
|
Cấu trúc phải đảm bảo phát hiện được bất kỳ một lỗi đơn ngẫu nhiên nào và hệ thống phải chuyển sang trạng thái an toàn. |
Kênh đơn với chức năng tự kiểm tra và giám sát, hoặc |
M 1.1 |
A.3.1 |
|
kênh đôi hoặc nhiều hơn với chức năng so sánh. |
M 1.3 |
A.2.5 |
||
|
Bộ xử lý
|
Phải phát hiện được lỗi ở bộ xử lý, có thể dẫn đến kết quả sai lệch. Nếu lỗi như trên có thể dẫn đến tình huống nguy hiểm, hệ thống phải chuyển sang trạng thái an toàn. |
Phần cứng sửa lỗi, hoặc |
M 2.1 |
A.3.4 |
|
bộ kiểm tra bằng phần mềm với sự hỗ trợ của phần cứng cho cấu trúc kênh đôi, hoặc |
M 2.2 |
A.3.1 |
||
|
M 2.4 |
A.1.3 |
|||
|
|
|
|||
|
kiểm tra chéo bằng phần mềm cho cấu trúc kênh đôi. |
M 2.5 |
A.3.5 |
||
|
Bộ nhớ cố định
|
Chỉnh sửa thông tin sai lệch, có nghĩa là các lỗi bit lẻ hoặc bit đôi và một số lỗi dạng 3 bit hoặc đa bít phải được phát hiện trước khi thang thực hiện hành trình tiếp theo. |
Các phép đo sau đây chỉ dùng cho cấu trúc kênh đơn: |
M 3.5 |
A.5.5 |
|
Kiểm tra với một bit dư (bit chẵn lẻ), hoặc |
M 3.1 |
A.4.3 |
||
|
an toàn khối dữ liệu với phép kiểm tra với một từ dư. |
||||
|
Bộ nhớ thay đổi
|
Các lỗi toàn cục trong quá trình đọc địa chỉ, ghi, lưu và đọc dữ liệu cũng như tất cả các lỗi bit lẻ và lỗi bit đôi và một số lỗi dạng 3 bit hoặc đa bit phải được phát hiện trước khi thang thực hiện hành trình tiếp theo. |
Các phép đo sau đây chỉ dùng cho cấu trúc kênh đơn: |
M 3.2 |
A.5.6 |
|
Bảo vệ từ với phép kiểm tra dư nhiều bit, hoặc |
M 4.1 |
A.5.2 |
||
|
kiểm tra thông qua các mẫu thử đối với các lỗi tĩnh hoặc động. |
|
|
||
|
Các cổng vào/ra và giao diện, bao gồm các kênh giao tiếp |
Các lỗi tĩnh và nhiều chéo trên các ngõ vào/ra cũng như các lỗi ngẫu nhiên hay có tính hệ thống trong luồng dữ liệu phải được phát hiện trước khi thang thực hiện hành trình tiếp theo. |
An toàn mã, hoặc |
M 5.4 |
A.6.2 |
|
mẫu thử. |
M 5.5 |
A.6.1 |
||
|
Đồng hồ |
Lỗi trong bộ tạo xung nhịp cho bộ xử lý như biến đổi tần số hoặc ngừng hoạt động phải được phát hiện trước khi thang thực hiện hành trình tiếp theo. |
Mạch cảnh giới với gốc thời gian riêng biệt, hoặc |
M 6.1 |
A.9.4 |
|
giám sát chéo. |
M 6.2 |
|
||
|
Trình tự chương trình |
Các lỗi như trình tự chương trình bị sai và thời gian thực thi chức năng an toàn không phù hợp phải được phát hiện trước khi thang thực hiện hành trình tiếp theo. |
Kết hợp điều chỉnh thời gian và giám sát logic trình tự chương trình |
M 7.1 |
A.9.4 |
|
CHÚ THÍCH: Tiếp theo sau việc phát hiện lỗi, trạng thái an toàn của thang máy phải được duy trì. |
||||
Bảng B.5 - Phép đo cụ thể theo SIL 2
|
Các bộ phận và chức năng |
Yêu cầu |
Phép đo |
Xem C.3 |
Tham khảo EN 61508- 7:2010 |
|
Cấu trúc
|
Cấu trúc phải đảm bảo phát hiện được bất kỳ một lỗi đơn ngẫu nhiên nào, với sự xem xét thích đáng về thời gian đáp ứng của hệ thống và hệ thống phải chuyển sang trạng thái an toàn. |
Kênh đơn với chức năng tự kiểm tra và giám sát, hoặc |
M 1.2 |
A.3.3 |
|
kênh đôi hoặc nhiều hơn với chức năng so sánh. |
M 1.3 |
A.2.5 |
||
|
Bộ xử lý
|
Lỗi ở bộ xử lý, có thể dẫn đến kết quả sai lệch, được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống. Nếu lỗi như trên có thể dẫn đến tình huống nguy hiểm, hệ thống phải chuyển sang trạng thái an toàn. |
Phần cứng sửa lỗi, và |
M 2.1 |
A.3.4 |
|
bộ kiểm tra bằng phần mềm với sự hỗ trợ của phần cứng cho cấu trúc kênh đơn, hoặc |
M 2.3 |
A.3.3 |
||
|
bộ so sánh cho cấu trúc kênh đôi, hoặc |
M 2.4 |
A.1.3 |
||
|
kiểm tra chéo bằng phần mềm cho cấu trúc kênh đôi. |
M 2.5 |
A.3.5 |
||
|
Bộ nhớ cố định
|
Chỉnh sửa thông tin sai lệch, có nghĩa là các lỗi bit lẻ hoặc bit đôi và một số lỗi dạng 3 bit hoặc đa bit phải được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống.
|
Các phép đo sau đây chỉ dùng cho cấu trúc kênh đơn: |
M 3.1 |
A.4.3 |
|
An toàn khối dữ liệu với phép kiểm tra với một từ dư, hoặc bảo vệ từ với phép kiểm tra dư nhiều bit. |
M 3.2 |
A.5.6 |
||
|
Bộ nhớ thay đổi
|
Các lỗi toàn cục trong quá trình đọc địa chỉ, ghi, lưu và đọc dữ liệu cũng như tất cả các lỗi bit lẻ và lỗi bit đôi và một số lỗi dạng 3 bit hoặc đa bit phải được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống. |
Các phép đo sau đây chỉ dùng cho cấu trúc kênh đơn: |
M 3.2 |
A.5.6 |
|
Bảo vệ từ với phép kiểm tra dư nhiều bit, hoặc kiểm tra thông qua các mẫu thử đối với các lỗi tĩnh hoặc động. |
M 4.1 |
A.5.2 |
||
|
Các cổng vào/ra và giao diện, bao gồm các kênh giao tiếp
|
Các lỗi tĩnh và nhiễu chéo trên các ngõ vào/ra cũng như các lỗi ngẫu nhiên hay có tính hệ thống trong luồng dữ liệu được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống.
|
An toàn mã, hoặc |
M 5.4 |
A.6.2 |
|
mẫu thử. |
M 5.5 |
A.6.1 |
||
|
Đồng hồ
|
Lỗi trong bộ tạo xung nhịp cho bộ xử lý như biến đổi tần số hoặc ngừng hoạt động được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống. |
Mạch cảnh giới với gốc thời gian riêng biệt, hoặc |
M 6.1 |
A.9.4 |
|
giám sát chéo. |
M 6.2 |
|
||
|
Trình tự chương trình |
Các lỗi như trình tự chương trình bị sai và thời gian thực thi chức năng an toàn không phù hợp phải được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống. |
Kết hợp điều chỉnh thời gian và giám sát logic trình tự chương trình |
M 7.1 |
A.9.4 |
|
CHÚ THÍCH: Tiếp theo sau việc phát hiện lỗi, trạng thái an toàn của thang máy phải được duy trì. |
||||
Bảng B.6 - Phép đo đặc trưng theo SIL 3
|
Các bộ phận và chức năng |
Yêu cầu |
Phép đo |
Xem C.3 |
Tham khảo EN 61508-7:2010 |
|
Cấu trúc |
Cấu trúc phải đảm bảo phát hiện được bất kỳ một lỗi đơn ngẫu nhiên nào, với sự xem xét thích đáng về thời gian đáp ứng của hệ thống và hệ thống phải chuyển sang trạng thái an toàn. |
Kênh đôi hoặc nhiều hơn với chức năng so sánh. |
M 1.3 |
A.2.5 |
|
Bộ xử lý
|
Lỗi ở bộ xử lý, có thể dẫn đến kết quả sai lệch, được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống. Nếu lỗi như trên có thể dẫn đến tình huống nguy hiểm, hệ thống phải chuyển sang trạng thái an toàn.
|
Bộ so sánh cho cấu trúc kênh đôi, hoặc |
M 2.4 |
A.1.3 |
|
kiểm tra chéo bằng phần mềm cho cấu trúc kênh đôi. |
M 2.5 |
A.3.5 |
||
|
Bộ nhớ cố định
|
Chỉnh sửa thông tin sai lệch, có nghĩa là các lỗi bit lẻ hoặc bít đôi và một số lỗi dạng 3 bit hoặc đa bit phải được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống.
|
Thủ tục an toàn khối dữ liệu bằng cách sao chép lại khối, hoặc |
M 3.3 |
A.4.5 |
|
an toàn khối dữ liệu với phép kiểm tra có nhiều từ dư. |
M 3.4 |
A.4.4 |
||
|
Bộ nhớ thay đổi
|
Các lỗi toàn cục trong quá trình đọc địa chỉ, ghi, lưu và đọc dữ liệu cũng như các lỗi tĩnh và kế nối động phải được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống.
|
Thủ tục an toàn khối dữ liệu bằng cách sao chép lại khối, hoặc |
M 4.2 |
A.5.7 |
|
phương pháp kiểm tra thử nghiệm như “Galpat”. |
M 4.3 |
A.5.3 |
||
|
Các cổng vào/ra và giao diện, bao gồm các kênh giao tiếp
|
Các lỗi tĩnh và nhiễu chéo trên các ngõ vào/ra cũng như các lỗi ngẫu nhiên hay có tính hệ thống trong luồng dữ liệu được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống.
|
Đầu vào song song đa kênh và |
M 5.1 |
A.6.5 |
|
đầu ra song song đa kênh, hoặc |
M 5.3 |
A.6.3 |
||
|
đọc lại dữ liệu đầu ra, hoặc |
M 5.2 |
A.6.4 |
||
|
an toàn mã, hoặc |
M 5.4 |
A.6.2 |
||
|
mẫu thử |
M 5.5 |
A.6.1 |
||
|
Đồng hồ
|
Lỗi trong bộ tạo xung nhịp cho bộ xử lý như biến đổi tần số hoặc ngừng hoạt động được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống. |
Mạch cảnh giới với gốc thời gian riêng biệt, hoặc |
M 6.1 |
A.9.4 |
|
giám sát chéo. |
M 6.2 |
|
||
|
Trình tự chương trình |
Các lỗi như trình tự chương trình bị sai và thời gian thực thi chức năng an toàn không phù hợp phải được phát hiện với sự xem xét thích đáng về thời gian đáp ứng của hệ thống. |
Kết hợp điều chỉnh thời gian và giám sát logic trình tự chương trình |
M 7.1 |
A.9.4 |
|
CHÚ THÍCH: Tiếp theo sau việc phát hiện lỗi, trạng thái an toàn của thang máy phải được duy trì. |
||||
B.3 Mô tả phép đo khả thi
Bảng bên dưới thể hiện những mô tả của các phép đo khả thi, vốn là những phép đo cần thiết khi cần đáp ứng các yêu cầu trong các bộ tiêu chuẩn có đòi hỏi sử dụng tiêu chuẩn này (ví dụ TCVN 6396-20 (EN 81-20), 5.11.2.6).
Bảng B.7 - Mô tả phép đo khả thi để kiểm soát lỗi
|
Các bộ phận và chức năng |
Số thứ tự phép đo |
Mô tả phép đo |
|
Cấu trúc
|
M 1.1 |
Cấu trúc kênh đơn với chức năng tự kiểm tra Mô tả: Mặc dù cấu trúc chỉ gồm một kênh đơn, để đảm bảo cho một quá trình tắt an toàn, phải có thêm các ngõ đầu ra dư thừa. Quá trình tự kiểm tra (theo chu kỳ) được áp dụng cho các đơn vị con của hệ thống PESSRAL trong khoảng thời gian phụ thuộc vào việc ứng dụng. Các phép kiểm tra này (ví dụ kiểm tra CPU hay bộ nhớ) được thiết kế để phát hiện các lỗi tiềm ẩn độc lập với luồng dữ liệu. Khi lỗi được phát hiện hệ thống sẽ chuyển sang trạng thái an toàn. |
|
M 1.2 |
Cấu trúc kênh đơn với chức năng tự kiểm tra Mô tả: Cấu trúc kênh đơn với chức năng tự kiểm tra và giám sát bao gồm một bộ giám sát phần cứng độc lập. Bộ phận này độc lập với ứng dụng, định kỳ nhận dữ liệu kiểm tra từ hệ thống, các dữ liệu này có thể là kết quả của quy trình tự kiểm tra. Trong trường hợp dữ liệu không đúng, hệ thống sẽ chuyển sang trạng thái an toàn. Ít nhất cần phải có hai kênh tắt hệ thống độc lập để quá trình tắt có thể được thực hiện bởi bản thân bộ xử lý hoặc bởi bộ giám sát. |
|
|
M 1.3 |
Kênh đôi hoặc nhiều hơn với chức năng so sánh Mô tả: Thiết kế liên quan đến an toàn dạng kênh đôi bao gồm hai đơn vị chức năng độc lập và không hồi tiếp. Điều này cho phép các chức năng cụ thể có thể được xử lý một cách độc lập trong mỗi kênh. Đối với hệ thống PESSRAL kênh đôi được thiết kế riêng cho hoạt động của một thiết bị an toàn, việc thiết kế các kênh có thể giống về mặt phần cứng và phần mềm. Trong trường hợp hệ thống PESSRAL kênh đôi được dùng cho các giải pháp phức hợp (ví dụ kết hợp nhiều chức năng an toàn với nhau) và nếu không thể xác định một cách rõ ràng các quy trình hay điều kiện, có thể cân nhắc sử dụng đa dạng các phần mềm và phần cứng. Cấu trúc có một chức năng có thể so sánh tín hiệu nội bộ (như so sánh bus) và/hoặc tín hiệu đầu ra phù hợp với các chức năng an toàn để hỗ trợ việc phát hiện lỗi. Ít nhất cần phải có hai kênh tắt hệ thống độc lập để quá trình tắt có thể được thực hiện bởi chính các kênh hoặc bởi bộ so sánh. Bản thân quá trình so sánh cũng phải phụ thuộc vào quá trình phát hiện lỗi. |
|
|
Bộ xử lý
|
M 2.1 |
Phần cứng sửa lỗi Mô tả: Những bộ phận này có thể sử dụng các phương phương phát hiện lỗi đặc biệt hoặc mạch sửa lỗi. Các kỹ thuật này được biết đến với cấu trúc đơn giản. |
|
M 2.2 |
Tự kiểm tra bằng phần mềm Mô tả: Tất cả các chức năng của bộ xử lý, sử dụng trong ứng dụng liên quan đến an toàn, phải được thử nghiệm theo chu kỳ. Các thử nghiệm này có thể kết hợp với thử nghiệm cho các bộ phận con, ví dụ bộ nhớ, cổng vào/ra,... |
|
|
M 2.3 |
Tự kiểm tra bằng phần mềm với sự hỗ trợ của phần cứng Mô tả: Một thiết bị phần cứng đặc biệt, hỗ trợ chức năng tự kiểm tra, được sử dụng cho chức năng phát hiện lỗi. Ví dụ, một bộ giám sát kiểm tra dữ liệu đầu ra định kỳ chứa các mẫu bit nhất định. |
|
|
M 2.4 |
Bộ so sánh cho cấu trúc kênh đôi Mô tả: |
|
|
|
|
Hai kênh với bộ so sánh phần cứng: a) Tín hiệu của cả hai bộ xử lý được so sánh bằng một thiết bị phần cứng theo chu kỳ hay một cách liên tục. Bộ so sánh có thể là một thiết bị thử nghiệm bên ngoài hay được thiết kế như là một thiết bị tự giám sát hoặc b) Tín hiệu của cả hai kênh được so sánh bằng bộ xử lý. Bộ so sánh có thể là một thiết bị thử nghiệm bên ngoài hay được thiết kế như là một thiết bị tự giám sát. |
|
M 2.5 |
So sánh chéo 2 kênh Mô tả:
Hai bộ xử lý được dùng để trao đổi qua lại các dữ liệu liên quan đến an toàn. Quá trình so sánh dữ liệu được thực hiện bởi mỗi bộ xử lý. |
|
|
Bộ nhớ cố định (ROM, EPROM,...)
|
M 3.1 |
Thủ tục an toàn khối dữ liệu với một từ dư (ví dụ tạo chữ ký với độ dài một từ thông qua ROM) Mô tả: Trong quá trình kiểm tra này, nội dung trong bộ nhớ ROM được nén với một giải thuật nào đó sao cho còn độ dài một từ. Giải thuật này, ví dụ là kiểm tra mã dư thừa theo chu kỳ (CRC), có thể được dùng với phần cứng hay phần mềm. |
|
M 3.2 |
Lưu trữ với phép kiểm tra dư nhiều bit (ví dụ mã hamming sửa đổi) Mô tả: Mỗi từ trong bộ nhớ được mở rộng bằng cách thêm vào một số bit dư để tạo ra mã hamming sửa đổi với khoảng cách hamming ít nhất là 4. Mỗi lần một từ được đọc, hệ thống có thể xác định được có lỗi xảy ra hay không bằng cách kiểm tra các bit dư. Nếu phát hiện sự khác biệt, hệ thống sẽ chuyển sang trạng thái an toàn. |
|
|
M 3.3 |
Thủ tục an toàn khối dữ liệu bằng cách sao chép lại khối Mô tả: Không gian địa chỉ được trang bị hai bộ nhớ. Bộ nhớ đầu tiên hoạt động theo cách bình thường. Bộ nhớ thứ hai chứa cùng thông tin và được truy cập song song với bộ nhớ thứ nhất. Dữ liệu đầu ra được so sánh và sẽ có lỗi nếu phát hiện sai biệt. Để phát hiện những lỗi bit nhất định, dữ liệu phải được lưu nghịch đảo vào một trong hai bộ nhớ và sau đó được đảo lại một lần nữa khi được đọc ra. Trong quy trình phần mềm, nội dung của hai bộ nhớ được so sánh theo chu kỳ bằng một chương trình. |
|
|
M 3.4 |
Thủ tục an toàn khối dữ liệu với nhiều từ dư Mô tả: Thủ tục này tính toán chữ ký sử dụng thuật toán CRC, nhưng giá trị thu được phải có độ dài ít nhất hai từ. Chữ ký mở rộng được lưu, tính toán lại và so sánh với trong trường hợp độ dài một từ. Một thông báo lỗi sẽ xuất hiện nếu có sự sai biệt. |
|
|
M 3.5 |
Lưu trữ với phép kiểm tra có độ dư một bit (ví dụ giám sát bộ nhớ ROM với bit chẵn lẻ) Mô tả: Mỗi từ trong bộ nhớ được mở rộng bằng cách thêm vào một bit (bit “chẵn lẻ”). Bit này sẽ biến mỗi từ thành một số chẵn hoặc lẻ chứa các giá trị luận lý 1. Tính chẵn lẻ của từ dữ liệu sẽ được kiểm tra mỗi khi từ này được đọc. Nếu phát hiện số có chứa các số 1 bị sai, một thông báo lỗi sẽ xuất hiện. Việc lựa chọn bit chẵn hay lẻ được thực hiện sao cho một trong hai từ số 0 (chỉ chứa toàn số 0) và từ số 1 (chỉ chứa toàn số 1), nếu từ nào bất lợi hơn trong trường hợp xảy ra lỗi thì từ đó sẽ không được xem là mã hợp lệ. Tính chẵn lẻ còn được sử dụng để phát hiện lỗi địa chỉ khi tính chẵn lẻ được tính toán cho mối liên kết giữa từ dữ liệu và địa chỉ của nó. |
|
|
Bộ nhớ thay đổi
|
M 4.1 |
Kiểm tra thông qua mẫu thử đối với các lỗi tĩnh hoặc động, ví dụ quy trình”walkpath” kiểm tra RAM Mô tả: Vùng nhớ cần thử nghiệm sẽ được khởi động với một chuỗi bit đồng nhất. Ô nhớ đầu tiên được nghịch đảo và vùng dữ liệu còn lại được kiểm tra để đảm bảo dữ liệu chung vẫn đúng. Sau quá trình này, ô nhớ đầu tiên sẽ được đảo lại một lần nữa để về giá trị ban đầu và toàn bộ quá trình được lặp lại cho các ô tiếp theo. Lần chạy thứ hai của “mô hình bit di động” này được thực hiện với dữ liệu chung được đảo ngược từ ban đầu. Nếu có sự khác biệt thì hệ thống sẽ chuyển sang trạng thái an toàn. |
|
M 4.2 |
Thủ tục an toàn khối dữ liệu bằng cách sao chép lại khối, ví dụ RAM đối với quá trình so sánh bằng phần cứng hoặc phần mềm Mô tả: Không gian địa chỉ được trang bị hai bộ nhớ. Bộ nhớ đầu tiên hoạt động theo cách bình thường. Bộ nhớ thứ hai chứa cùng thông tin và được truy cập song song với bộ nhớ thứ nhất. Dữ liệu đầu ra được so sánh và sẽ có lỗi nếu phát hiện sai biệt. Để phát hiện những lỗi bit nhất định, dữ liệu phải được lưu nghịch đảo vào một trong hai bộ nhớ và sau đó được đảo lại một lần nữa khi được đọc ra. Trong quy trình phần mềm, nội dung của hai bộ nhớ được so sánh theo chu kỳ bằng một chương trình. |
|
|
M 4.3 |
Kiểm tra các lỗi tĩnh và động, ví dụ “GALPAT” Mô tả: a) Quy trình “galpat” kiểm tra RAM: một giá trị nghịch đảo được ghi vào ô nhớ chuẩn được định trước và sau đó tất cả các ô nhớ còn lại được kiểm tra để đảm bảo nội dung vẫn đúng. Sau mỗi lần truy xuất đọc từ một trong các ô nhớ còn lại, ô nhớ chứa chứa dữ liệu nghịch đảo cũng được kiểm tra và đọc. Quy trình này được lặp lại cho mỗi ô nhớ. Lần chạy thứ hai được thực hiện với dữ liệu chung được đảo ngược từ ban đầu. Nếu có sự khác biệt thì xem như có lỗi; hoặc b) Quá trình kiểm tra “galpat” tường minh: khi bắt đầu quy trình kiểm tra, một “chữ ký”, liên quan đến nội dung của vùng bộ nhớ sẽ kiểm tra, được tạo bằng phần mềm hoặc cũng có thể bằng phần cứng và chữ ký này được lưu trong thanh ghi; quá trình này tương ứng với việc nạp dữ liệu vào bộ nhớ ban đầu như trong quá trình kiểm tra galpat. Các nội dung lúc này sẽ được ghi nghịch đảo vào ô nhớ thử nghiệm và nội dung ở các ô còn lại sẽ được kiểm tra. Nội dung ở ô nhớ thử nghiệm cũng được đọc sau mỗi lần truy xuất đọc từ một trong các ô nhớ. Vì nội dung của các ô nhớ còn lại thực sự không được biết, nên nội dung của chúng không thể kiểm tra riêng lẻ được, nhưng có thể kiểm tra bằng cách tạo chữ ký một lần nữa. Sau lần chạy đầu tiên này cho ô nhớ đầu tiên, một lần chạy thứ hai cho ô nhớ này diễn ra với nội dung được nghịch đảo vài lần - và nội dung được trở về giá trị ban đầu lần nữa. Do đó nội dung dữ liệu gốc của bộ nhớ được thiết lập lại. Tất cả các ô nhớ đều được kiểm tra theo cách này. Nếu có sự khác biệt thì xem như có lỗi. |
|
|
Các cổng vào/ra và giao diện |
M 5.1 |
Đầu vào song song đa kênh Mô tả: Đây là luồng dữ liệu phụ thuộc vào phép so sánh của các nguồn đầu vào độc lập tuân theo vùng dung sai cho phép (giá trị, thời gian). |
|
|
M 5.2 |
Đọc lại dữ liệu đầu ra (giám sát đầu ra) Mô tả: Đây là luồng dữ liệu phụ thuộc vào phép so sánh của nguồn đầu ra với các nguồn đầu vào độc lập tuân theo vùng dung sai cho phép (giá trị, thời gian). Lỗi không thể lúc nào cũng liên quan đến sai sót ở dữ liệu đầu ra. |
|
M 5.3 |
Đầu ra song song đa kênh Mô tả: Đây là luồng dữ liệu phụ thuộc vào phép kiểm tra độ dư ở đầu ra. Việc phát hiện lỗi diễn ra trực tiếp thông qua quy trình kỹ thuật hoặc qua bộ so sánh bên ngoài. |
|
|
M 5.4 |
An toàn mã Mô tả: Thủ tục này bảo vệ thông tin đầu vào và đầu ra khỏi các lỗi ngẫu nhiên hay lỗi mang tính hệ thống. Nó cung cấp luồng dữ liệu phụ thuộc vào việc nhận diện lỗi của các ngõ vào và ngõ ra với phương pháp dư thông tin hoặc/và dư thời gian. |
|
|
M 5.5
|
Mẫu thử (mẫu) Mô tả: Đây là luồng dữ liệu phụ thuộc vào quá trình kiểm tra theo chu kỳ của các ngõ vào và ngõ ra với sự trợ giúp của mẫu thử được xác định trước để so sánh dữ liệu quan sát được với giá trị kỳ vọng tương ứng. Thông tin của mẫu thử, việc tiếp nhận mẫu thử và việc đánh giá mẫu thử phải độc lập nhau. Giả định rằng tất cả các mẫu đầu vào đều được kiểm tra. |
|
|
Đồng hồ
|
M 6.1
|
Mạch cảnh giới với gốc thời gian riêng Mô tả: Bộ đếm thời gian phần cứng với gốc thời gian riêng được kích hoạt bởi quá trình vận hành đúng của chương trình. |
|
M 6.2 |
Giám sát chéo Mô tả: Bộ đếm thời gian phần cứng với gốc thời gian riêng được kích hoạt bởi quá trình vận hành đúng của chương trình ở bộ xử lý khác. |
|
|
Trình tự chương trình |
M 7.1 |
Kết hợp điều chỉnh thời gian và giám sát logic trình tự chương trình Mô tả: Một thiết bị hoạt động dựa vào thời gian giám sát trình tự chương trình được kích hoạt chỉ nếu trình tự của các phần của chương trình được thực thi đúng. |
Phụ lục C
(tham khảo)
Ví dụ về tính toán ray dẫn hướng
C.1 Yêu cầu chung
C.1.1 Ví dụ sau được dùng để giải thích cho việc tính toán ray dẫn hướng
C.1.2 Các ký hiệu sau đây đối với kích thước thang máy được sử dụng với hệ tọa độ Đề các cho tất cả các trường hợp hình học khả dĩ:
C là tâm cabin;
Dx là kích thước cabin theo phương X, chiều sâu cabin;
Dy là kích thước cabin theo phương Y, chiều rộng cabin;
δstr-x là độ võng của kết cấu công trình theo trục x, tính bằng milimét;
δstr-y là độ võng của kết cấu công trình theo trục y, tính bằng milimét;
h là khoảng cách giữa hai ngàm dẫn hướng;
l là khoảng cách giữa 2 giá đỡ cố định ray;
P là khối lượng cabin không tải và các thiết bị hỗ trợ, chẳng hạn một phần của cáp động, cáp/xích bù (nếu có),…, tính bằng kilôgam;
Q là tải định mức, tính bằng kilôgam;
S là điểm treo cabin;
xc, yc là tọa độ tâm cabin (C) trong hệ tọa độ của mặt ngang ray dẫn hướng;
xi, yi là tọa độ của cửa cabin, i = 1, 2, 3 hoặc 4;
xp, yp là tọa độ trọng tâm cabin (P), trong hệ tọa độ của mặt ngang ray đến hướng;
xQ, yQ là tọa độ đặt tải định mức (Q) trong hệ tọa độ của mặt ngang ray dẫn hướng;
xs, ys là tọa độ điểm treo cabin (S), trong hệ tọa độ của mặt ngang ray dẫn hướng;
1,2,3,4 là tâm cửa cabin 1, 2, 3, 4;
→ là hướng chất tải;
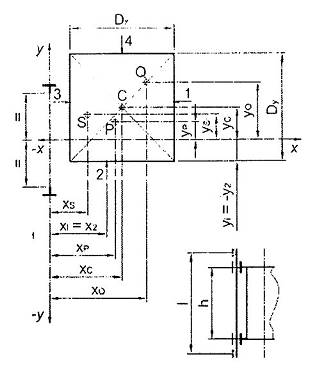
Hình C.1 - Phân bố tải trong cabin - Trường hợp chung
C.1.3 Các ký hiệu sau được sử dụng trong công thức, xem Điều C.2 và Hình C.1:
A là diện tích tiết diện ngang của ray dẫn hướng, tính bằng milimét vuông;
c là độ rộng của phần chuyển tiếp giữa chân ray và mặt ray, tính bằng milimét;
δperm là độ võng cho phép tối đa, tính bằng milimét;
δx là độ võng theo trục X, tính bằng milimét;
δy là độ võng theo trục Y, tính bằng milimét;
δstr-x là độ võng theo trục x của kết cấu công trình, tính bằng milimét;
δstr-y là độ võng theo trục y của kết cấu công trình, tính bằng milimét;
E là mô đun đàn hồi của vật liệu ray, tính bằng Newton trên milimét vuông;
Fp là lực đẩy xuyên của tất cả các giá đỡ cố định ray lên một thanh ray dẫn hướng (do sự lún tự nhiên của công trình hoặc do bê tông co rút), tính bằng Newton;
Fs là lực tác động theo phương thẳng đứng lên ngưỡng cửa cabin do quá trình chất và dỡ tải, tính bằng Newton;
Fv là lực theo phương đứng tác động lên thanh ray của cabin, đối trọng hoặc khối lượng cân bằng, tính bằng newton;
Fx là phản lực theo phương X, tính bằng Newton;
Fy là phản lực theo phương Y, tính bằng Newton;
gn là gia tốc trọng trường chuẩn khi rơi tự do, tính bằng mét trên giây bình phương;
lx là mô-men quán tính của tiết diện ray theo trục X, tính bằng milimét mũ bốn;
ly là mô-men quán tính của tiết diện ray theo trục Y, tính bằng milimét mũ bốn;
k1 hệ số tác động áp dụng cho loại bộ hãm an toàn được sử dụng;
k2 hệ số tác động áp dụng cho điều kiện vận hành;
k3 hệ số tác động áp dụng cho các bộ phận phụ trợ và các kịch bản vận hành khác;
Maux là lực tác động lên ray từ các thiết bị phụ trợ, tính bằng Newton;
Mg là khối lượng của ray dẫn hướng dạng một thanh, tính bằng kilôgam;
Mm là mô men uốn, tính bằng Newton milimét;
Mx là mô men chống uốn theo trục x, tính bằng Newton milimét;
My là mô men chống uốn theo trục y, tính bằng Newton milimét;
n là số lượng ray dẫn hướng;
σ là ứng suất tổng hợp, tính bằng Newton trên milimét vuông;
σk là ứng suất uốn dọc, tính bằng Newton trên milimét vuông;
σm là ứng suất uốn, tính bằng Newton trên milimét vuông;
σF là ứng suất uốn cục bộ tại cạnh ray, tính bằng Newton trên milimét vuông;
σperm là ứng suất cho phép, tính bằng Newton trên milimét vuông;
σx là ứng suất uốn theo trục x, tính bằng Newton trên milimét vuông;
σy là ứng suất uốn theo trục y, tính bằng Newton trên milimét vuông
Wx là mô đun chống uốn của tiết diện trên trục x, tính bằng milimét khối;
Wy là mô đun chống uốn của tiết diện trên trục y, tính bằng milimét khối;
ω là giá trị omega.
C.2 Cấu hình chung cho thang máy với bộ hãm an toàn
C.2.1 Hoạt động của bộ hãm an toàn
C.2.1.1 Ứng suất uốn
a) Ứng suất uốn theo trục y của thanh ray do lực dẫn hướng:
![]() , σy =
, σy = ![]()
b) Ứng suất uốn theo trục x của thanh ray do lực dẫn hướng:
 ,
, ![]() , σx =
, σx = ![]()
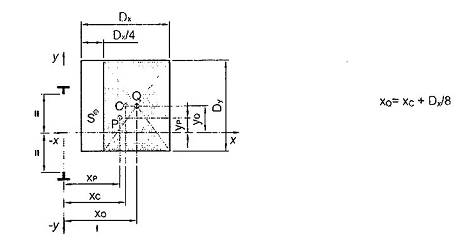
Hình C.2 - Hoạt động bộ hãm an toàn - Phân bố tải trong cabin - Trường hợp 1 lệch tâm theo trục x
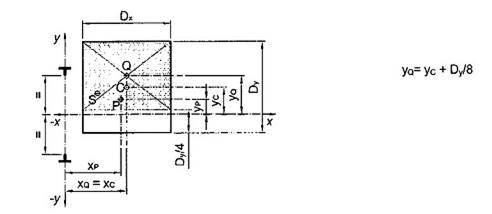
Hình C.3 - Hoạt động bộ hãm an toàn - Phân bố tải trong cabin - Trường hợp 2 lệch tâm theo trục y
C.2.1.2 Uốn dọc
![]() ,
, ![]()
C.2.1.3 Ứng suất tổng hợp7)
σ = σm = σx
+ σy ≤ σperm, σ = σm + ![]() ≤ σpermσ = σk
+ 0,9 · σm ≤ σperm
≤ σpermσ = σk
+ 0,9 · σm ≤ σperm
C.2.1.4 Uốn cạnh ranh8)
σF = ![]() ≤ σperm hoặc σF
=
≤ σperm hoặc σF
=![]() ≤ σperm
≤ σperm
C.2.1.5 Độ võng9)
![]()
C.2.2 Trường hợp thang máy hoạt động bình thường, đang chạy
C.2.2.1 Ứng suất uốn
a) Ứng suất uốn theo trục y của thanh ray do lực dẫn hướng:
|
|
|
b) Ứng suất uốn theo trục x của thanh ray do lực dẫn hướng:
|
|
|
 ,
, Phân bố tải:
Trường hợp 1 lệch tâm theo trục x (xem mục C.2.1.1).
Trường hợp 2 lệch tâm theo trục y (xem mục C.2.1.1).
C.2.2.2 Uốn dọc
|
|
|
C.2.2.3 Ứng suất tổng hợp10)
|
σm = σx + σy ≤ σperm , |
|
C.2.2.4 Uốn cạnh ray11)
![]()
C.2.2.5 Độ võng12)
![]()
C.2.3 Trường hợp thang máy hoạt động bình thường, chất tải
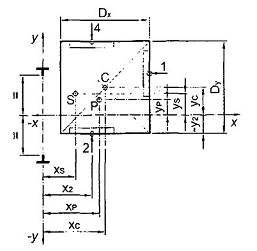
Hình C.4 - Trường hợp thang máy động bình thường, chất tải - Phân bố tải
C.2.3.1 Ứng suất uốn
a) Ứng suất uốn theo trục y của thanh ray do lực dẫn hướng:
|
|
|
b) Ứng suất uốn theo trục x của thanh ray do lực dẫn hướng:
|
|
|
 ,
, C.2.3.2 Uốn dọc
|
Fv = Mg · gn + Fp, |
|
C.2.3.3 Ứng suất tổng hợp13)
|
σ = σm = σx + σy ≤ σperm, |
|
C.2.3.4 Uốn cạnh ray
![]()
C.2.3.5 Độ võng
![]()
Phụ lục D
(tham khảo)
Tính toán lực kéo - Ví dụ
Đối với ví dụ theo Hình D.1 sẽ áp dụng các công thức sau.
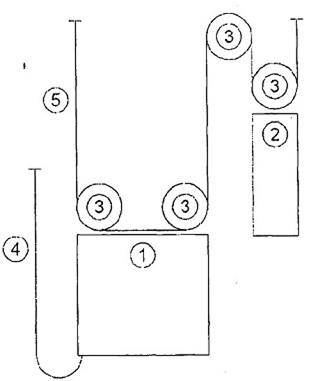
CHÚ DẪN
![]() cabin
cabin
![]() đối tượng
đối tượng
![]() puli
puli
![]() cáp động
cáp động
![]() thiết bị treo
thiết bị treo
Hình D.1 - Ví dụ 2:1, không có phương tiện bù
Trạng thái chất tải cho cabin
Cabin mang tải bằng 125% tải danh định ở tầng thấp nhất, không tính đến ma sát.
- ![]()
- ![]()
Trạng thái phanh khẩn cấp
Giả định lực ma sát tại các puli và ray dẫn hướng có giá trị nhỏ nhất.
a) Cabin mang tải bằng tài danh định tại tầng thấp nhất
- ![]()
- ![]()
b) Cabin không tải tại tầng cao nhất
- ![]()
- ![]()
Trạng thái đối trọng ngừng di chuyển
Cabin không tải tại tầng cao nhất, không tính đến ma sát.
- ![]()
- T2 = MSRcwt ·gn
Phụ lục E
(tham khảo)
Số lượng puli ma sát tương đương Nequiv - Ví dụ
|
|
γ = 40o Nequiv(t) = 10 (theo Bảng 2) Kp = (600/500)4 = 2,07 Nequiv(p) = 2,07 • (2+0) = 4,14 Nequiv = 10 + 4,14 = 14,14 CHÚ THÍCH: Không có hiện tượng uốn ngược do puli chuyển động. |
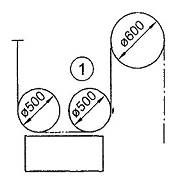
CHÚ DẪN
![]() Phía cabin
Phía cabin
Hình E.1 - Hệ số luồn cáp (bội suất) 2:1 - Rãnh chữ V
|
|
β = 90o Nequiv(t) = 5 (theo Bảng 2) Kp = (600/400)4 = 5,06 Nequiv(p) = 5,06 • (1+0) = 5,06 Nequiv = 5 + 5,06 = 10,06
|
Hình E.2 - Hệ số luồn cáp (bội suất) 1:1 - Rãnh chữ U xẻ đáy
|
|
Nequiv(t) = 1 + 1 Kp = 1 Nequiv(p) = 1 • (1+1) = 2 Nequiv = 2 + 2 = 4 CHÚ THÍCH: Cáp quấn quanh puli máy dẫn động và puli phụ 2 lần. |
Hình E.3 - Hệ số luồn cáp (bội suất) 1:1 (cuốn hai vòng) - Rãnh chữ U
Thư mục tài liệu tham khảo
[1] CEN/TS 81-11, Safety rules for the construction and installation of lifts - Basics and interpretations - Part 11: Interpretations related to EN 81 family of standards (Yêu cầu an toàn về cấu tạo và lắp đặt thang máy - Các điều cơ bản và diễn giải - Phần 11: Diễn giải liên quan đến họ tiêu chuẩn EN 81).
[2] EN 60747-5-5, Semiconductor devices - Discrete devices - Part 5-5: Optoelectronic devices - Photocouplers (IEC 60747-5-5) (Thiết bị bán dẫn - Thiết bị đơn - Phần 5-5: Thiết bị quang điện tử - Thiết bị cách ly quang học (IEC 60747-5-5)).
[3] EN 60950-1:2006, Information technology equipment - Safety - Part 1: General requirements (IEC 60950-1:2005) (Thiết bị công nghệ thông tin - An toàn - Phần 1: Yêu cầu chung (IEC 60950- 1:2005)).
[4] EN 61249 (tất cả các phần), Materials for printed boards and other interconnecting structures (IEC 61249) (Vật liệu cho bảng mạch in và các cấu trúc kết nối khác (IEC 61249)).
[5] EN 61558-1:2005, Safety of power transformers, power supplies, reactors and similar products - Part 1: General requirements and tests (IEC 61558-1:2005) (An toàn cho biến áp nguồn, bộ nguồn, bộ điện kháng và thiết bị tương tự- Phần 1: Yêu cầu chung và thử nghiệm (IEC 61558-1:2005)).
[6] EN 62326-1, Printed boards - Part 1: Generic specification (IEC 62326-1) (Bảng mạch In - Phần 1: Đặc tính kỹ thuật chung (IEC 62326-1)).
MỤC LỤC
Lời nói đầu
Lời giới thiệu
1 Phạm vi áp dụng
2 Tài liệu viện dẫn
3 Thuật ngữ và định nghĩa
4 Danh mục các mối nguy hiểm đáng kể
5 Yêu cầu về thiết kế, tính toán kiểm tra và thử nghiệm
5.1 Yêu cầu chung đối với thử nghiệm mẫu các thiết bị an toàn
5.2 Thử nghiệm mẫu thiết bị khóa cửa cabin và cửa tầng
5.3 Thử nghiệm mẫu bộ hãm an toàn
5.4 Thử nghiệm mẫu bộ khống chế vượt tốc
5.5 Thử nghiệm mẫu bộ giảm chấn
5.6 Thử nghiệm mẫu đối với các mạch an toàn chứa các linh kiện điện tử và/hoặc hệ thống điện tử lập trình được (PESSRAL)
5.7 Thử nghiệm mẫu thiết bị chống vượt tốc cabin theo chiều lên
5.8 Thử nghiệm mẫu thiết bị bảo vệ cabin di chuyển không định trước
5.9 Thử nghiệm mẫu van ngắt/van một chiều
5.10 Tính toán ray dẫn hướng
5.11 Tính toán dẫn động ma sát
5.12 Tính toán hệ số an toàn cáp treo cho thang máy điện
5.13 Tính toán pít tông, xy lanh, ống dẫn cứng và phụ tùng nối ống
5.14 Thử va đập bằng quả lắc
5.16 Yêu cầu về thiết kế hệ thống điện tử lập trình được (PESSRAL)
Phụ lục A (quy định) Giấy chứng nhận thử nghiệm mẫu
Phụ lục B (quy định) Hệ thống điện tử lập trình được liên quan đến an toàn áp dụng cho thang máy (PESSRAL)
Phụ lục C (tham khảo) Ví dụ về tính toán ray dẫn hướng
Phụ lục D (tham khảo) Tính toán lực kéo - Ví dụ
Phụ lục E (tham khảo) Số lượng puli ma sát tương đương Nequiv- Ví dụ
Thư mục tài liệu tham khảo
1) Trong hệ thống tiêu chuẩn quốc gia đã có TCVN 7383:2004 hoàn toàn tương đương ISO 12100:2003.
2) Trong Chỉ thị của Châu Âu về Thang máy, có một danh mục bộ phận an toàn, bao gồm bộ hãm an toàn, bộ khống chế vượt tốc, khóa cửa tầng,...Trong tiêu chuẩn này, một số thiết bị khác cũng có thể là thiết bị an toàn nếu phải chứng nhận vận hành an toàn của chúng thông qua phương pháp thử nghiệm mẫu.
3) “Phía trước van ngắt’’ có nghĩa là đoạn giữa xy lanh và van ngắt.
4) Áp dụng cho pít tông vươn dài theo chiều hướng lên trên.
5) Áp dụng cho pít tông vươn dài theo chiều hướng lên trên.
6) Áp dụng cho pít tông vươn dài theo chiều hướng lên trên.
7) Các hình này áp dụng cho phân bố tải trường hợp 1 và 2, xem C.2.1.1. Nếu σperm<σm, các hình cho 5.10.2.2 có thể được dùng để có kích thước ray dẫn hướng nhỏ nhất.
8) Các hình này áp dụng cho cả hai trường hợp phân bố tải trong C.2.1.1.
9) Các hình này áp dụng cho cả hai trường hợp phân bố tải trong C.2.1.1.
10) Các hình này áp dụng cho cả hai trường hợp phân bố tải trong C.2.1.1. Nếu σperm<σm, các hình cho 5.10.2.2 có thể được dùng để có kích thước ray dẫn hướng nhỏ nhất.
11) Các hình này áp dụng cho cả hai trường hợp phân bố tải trong C.2.1.1.
12) Các hình này áp dụng cho cả hai trường hợp phân bố tải trong C.2.1.1.
13) Nếu σperm<σm, các hình cho 5.10.2.2 có thể được dùng để có kích thước ray dẫn hướng nhỏ nhất.