Nội dung toàn văn Tiêu chuẩn Việt Nam TCVN 7463:2005 (ISO 14791 : 2000) về Phương tiện giao thông đường bộ - Tổ hợp ô tô tải hạng nặng với rơ moóc, sơ mi rơ moóc và ô tô khách nối toa - Phương pháp thử ổn định ngang do Bộ Khoa học và Công nghệ ban hành
TIÊU CHUẨN VIỆT NAM
TCVN 7463 : 2005
ISO 14791 : 2000
PHƯƠNG TIỆN GIAO THÔNG ĐƯỜNG BỘ - TỔ HỢP Ô TÔ TẢI HẠNG NẶNG VỚI RƠ MOÓC, SƠ MI RƠ MOÓC VÀ ÔTÔ KHÁCH NỐI TOA - PHƯƠNG PHÁP THỬ ỔN ĐỊNH NGANG
Road vehicles- Heavy commercial vehicle combinations and articulated buses- Lateral stability test methods
Lời nói đầu
TCVN 7463 : 2005 hoàn toàn tương đương với tiêu chuẩn ISO 14791 : 2000.
TCVN 7463 : 2005 do Ban kỹ thuật tiêu chuẩn TCVN/TC 22 "Phương tiện giao thông đường bộ" và Cục Đăng kiểm Việt Nam biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học và Công nghệ ban hành.
PHƯƠNG TIỆN GIAO THÔNG ĐƯỜNG BỘ - TỔ HỢP Ô TÔ TẢI HẠNG NẶNG VỚI RƠ MOÓC, SƠ MI RƠ MOÓC VÀ ÔTÔ KHÁCH NỐI TOA - PHƯƠNG PHÁP THỬ ỔN ĐỊNH NGANG
Road vehicles- Heavy commercial vehicle combinations and articulated buses- Lateral stability test methods
1 Phạm vi áp dụng
Tiêu chuẩn này quy định phương pháp thử để xác định khả năng ổn định ngang của tổ hợp ô tô tải hạng nặng với rơ moóc, sơ mi rơ moóc được định nghĩa trong TCVN 6211:2003, bao gồm cả tổ hợp ô tô tải với rơ moóc trục trung tâm và ôtô khách nối toa (sau đây gọi tắt là tổ hợp xe). Tiêu chuẩn này áp dụng cho ô tô tải và rơmooc, sơ mi rơ moóc có khối lượng trên 3,5 tấn và ô tô khách có khối lượng trên 5 tấn, nghĩa là các xe loại N2, N3, O3, O4 và M3 theo Phụ lục R của TCVN 6919:2001.
Tính năng cơ động quy định trong phương pháp thử này không phản ánh đầy đủ điều kiện lái thực tế nhưng được dùng để xác định khả năng ổn định ngang của tổ hợp xe hạng nặng.
2 Tài liệu viện dẫn
TCVN 6211:2003 (ISO 3833:1977) Phương tiện giao thông đường bộ - Kiểu, thuật ngữ và định nghĩa.
TCVN 6529:1999 (ISO 1176:1990) Phương tiện giao thông đường bộ - Khối lượng - Thuật ngữ, định nghĩa và mã hiệu.
TCVN 6919:2001 - Phương tiện giao thông đường bộ - Thiết bị phanh của xe cơ giới, moóc, bán moóc - Yêu cầu và phương pháp thử trong phê duyệt kiểu.
ISO 8855:1991 Road vehicles - Vehicle dynamics and road-holding ability- Vocabulary (Phương tiện giao thông đường bộ - Động lực học xe và khả năng bám đường - Từ vựng).
ISO 9815:1992 Passenger-car/trailer combinations - Lateral stability test (Tổ hợp ô tô con/rơmooc - Thử ổn định ngang).
3 Thuật ngữ và định nghĩa
Tiêu chuẩn này áp dụng các thuật ngữ, định nghĩa trong ISO 8855 và các thuật ngữ, định nghĩa sau đây:
3.1 Xe đơn (vehicle unit)
Xe thành phần (không có khớp nối) trong tổ hợp xe, hoạt động độc lập hoặc kết hợp với một hoặc nhiều xe thành phần khác, được nối với nhau bằng khớp mềm.
Ví dụ : Đầu kéo, sơmirơ mooc và xe được kéo.
3.2 Hệ số mở rộng phía sau (rearward amplification)
Tỷ số giữa giá trị thay đổi chuyển động lớn nhất của xe đơn đi sau với giá trị đó của xe đơn đi đầu tiên trong quá trình chuyển hướng (thay đổi hướng chuyển động) xác định.
3.3 Dịch chuyển bên (offtracking)
Sự lệch ngang giữa quỹ đạo của một điểm trên đường tâm trục trước của xe so với quỹ đạo của một điểm trên đường tâm một số bộ phận khác của xe.
Chú thích 1: Xem 8.3 để xác định độ dịch chuyển bên.
Chú thích 2: Trong chuyển làn đường đơn, khi quỹ đạo phần còn lại của xe cách xa hơn quỹ đạo trục trước so với hình chiếu quỹ đạo ban đầu của xe thì quỹ đạo phần còn lại được gọi là "dịch chuyển thừa" so với quỹ đạo trục trước tại điểm đó. Trong trường hợp ngược lại, quỹ đạo phần còn lại được gọi là "dịch chuyển thiếu" so với quỹ đạo trục trước.
3.4 Vận tốc tắt dần - 0 (zero-damping speed)
Vận tốc mà tại đó hệ số tắt dần của dao động tự do khi chuyển động lệch hướng của tổ hợp xe bằng không.
3.5 Vận tốc tắt dần - chuẩn (reference-damping speed)
Vận tốc tại đó hệ số tắt dần của dao động tự do khi chuyển động lệch hướng của tổ hợp xe bằng 0,05.
3.6 Điểm trên đường tâm (centreline point)
Điểm nằm trên giao tuyến giữa mặt đỗ xe và mặt phẳng đối xứng x-z của bộ phận đang xét, ở ngay bên dưới so với vị trí chuẩn dọc của bộ phận này.
Chú thích: Đối với trục, điểm chuẩn dọc là trục quay bánh xe. Đối với bộ phận khác, điểm chuẩn dọc phải được nói rõ.
3.7 Góc chuyển hướng (yaw-articulation angle)
Góc lệch của trục x thuộc hệ trục trung gian của xe đơn đi trước trong hệ trục trung gian của xe đơn đi sau. Nghĩa là góc lệch giữa các trục x của hai xe đơn được xác định do sự quay của xe đơn đi trước trong hệ trục của xe đơn đi sau.
Chú thích: Các xe đơn được xét thường là liền kề nhưng không bắt buộc.
4 Mục đích thử
Phép thử nhằm xác định khả năng ổn định ngang của tổ hợp xe. Khả năng ổn định ngang được đặc trưng bởi:
- hệ số mở rộng phía sau của gia tốc ngang và vận tốc chuyển hướng;
- dịch chuyển bên động lực học;
- vận tốc tắt dần - 0;
- sự tắt dần của dao động khi chuyển hướng, gồm cả thông tin về kiểu-dạng.
Trong bốn phép đo tính năng này, hai phép đo là hệ số mở rộng phía sau và độ dịch chuyển bên động lực học liên quan đến tính đáp ứng cưỡng bức, còn hai phép đo là vận tốc tắt dần - 0 và sự tắt dần của chuyển hướng thì liên quan đến tính đáp ứng không cưỡng bức.
Để có phép đo hoàn chỉnh, cần phải xác định các thông số sau:
- góc vành tay lái;
- vận tốc dọc;
- vận tốc chuyển hướng của xe đơn đi đầu tiên và xe đơn đi sau cùng;
- gia tốc ngang của trục trước xe của xe đơn đi đầu tiên tại tâm bánh xe hoặc điểm thấp hơn chiều cao tâm bánh xe và gia tốc ngang của trọng tâm xe đơn sau cùng;
- góc chuyển hướng hoặc vận tốc góc chuyển hướng giữa các xe đơn;
- độ dịch chuyển của trục có dịch chuyển bên lớn nhất trong tổ hợp xe.
Để có thông tin đầy đủ về trạng thái hoạt động của tổ hợp xe, cần phải xác định:
- gia tốc ngang ở trọng tâm của mỗi xe đơn;
- vận tốc chuyển hướng của mỗi xe đơn;
- góc xoay của mỗi xe đơn, tốt nhất là trên trục sau cùng;
- vận tốc ngang hoặc góc trượt của trục sau cùng của mỗi xe đơn;
- tải trọng động trên bánh xe của mỗi xe đơn;
- độ dịch chuyển ngang của mỗi trục trong tổ hợp xe;
- độ dịch chuyển bên của điểm có độ dịch chuyển bên lớn nhất của tổ hợp xe nhưng không phải trục. Có thể dùng các phương pháp thử sau để xác định các đặc tính độ ổn định ngang khác nhau:
- tín hiệu vào giả định ngẫu nhiên;
- sự chuyển làn đường đơn;
- tín hiệu vào dạng xung.
Có thể dùng tín hiệu vào giả định ngẫu nhiên để xác định hệ số mở rộng phía sau lớn nhất. Phương pháp này cho biết một cách đầy đủ sự phụ thuộc vào tần số của hệ số mở rộng phía sau.
Trong chuyển làn đường đơn, hệ số mở rộng phía sau và dịch chuyển bên động học có thể được xác định theo từng trường hợp chuyển hướng cụ thể. Có thể thực hịên chuyển làn đường đơn bằng cách tác dụng tín hiệu lái đầu vào dạng sóng hình sin đơn hoặc đi theo quỹ đạo tạo ra tín hiệu gia tốc ngang đầu vào dạng sóng hình sin đơn.
Chú thích: Kết quả đo hệ số mở rộng phía sau dùng tín hiệu vào giả định ngẫu nhiên và dùng chuyển làn đường đơn là khác nhau. Hai phương pháp thử này có sự khác nhau cơ bản. Phương pháp tín hiệu vào giả định ngẫu nhiên được dùng để thu được sự biểu thị đầy đủ về độ khuyếch đại của hệ thống trong miền tần số. Trong khi đó, phương pháp chuyển làn đường đơn chỉ cho biết độ khuyếch đại tổng hợp của hệ thống từ mức tần số phân bố của sự chuyển làn đường cụ thể thực hiện khi thử.
Ngoài ra, kết quả đo thu được từ hai phương pháp chuyển làn đường sẽ khác nhau do mức tần số của tín hiệu lái đầu vào là khác nhau trong hai trường hợp. Với phương pháp lái dạng sóng hình sin đơn, tín hiệu lái đầu vào được xác định, trong khi đó đối với phương pháp đi theo quỹ đạo thì gia tốc ngang được xác định. ở phương pháp thứ nhất, gia tốc ngang phụ thuộc vào động lực học của tổ hợp xe và đặc tính của hệ thống lái, ví dụ như liên kết và phụ thuộc. ở phương pháp thứ hai, quá trình lái cũng phụ thuộc vào những ảnh hưởng như vậy. Điều này tạo ra sự khuyếch đại tổng hợp khác nhau của hệ thống khi đo bằng hai phương pháp.
Tín hiệu vào dạng xung được dùng để xác định vận tốc tắt dần - 0, sự tắt dần của dao động khi chuyển hướng và tỷ số vận tốc chuyển hướng.
Thực hiện phân tích đối với phương pháp giả định ngẫu nhiên trên miền tần số. Mọi phân tích khác được thực hiện trên miền thời gian.
Phương pháp được chọn phải được chỉ ra trong trình bày số liệu tổng quát (xem phụ lục A) và trong trình bày kết quả thử (xem phụ lục B).
5 Thiết bị đo
5.1 Mô tả
Các biến số trong điều 4 được chọn cho mục đích thử phải được giám sát bằng bộ chuyển đổi thích hợp và số liệu phải được ghi theo thời gian trên một máy ghi đa kênh. Phạm vi hoạt động chính và sai số lớn nhất của hệ thống bộ chuyển đổi /máy ghi được cho trong Bảng 1.
Bảng 1 - Biến số, phạm vi hoạt động chính và sai số lớn nhất
|
Biến số |
Phạm vi hoạt động chính |
Sai số lớn nhất yêu cầu đối với hệ thống liên hợp |
|
Góc vành tay lái |
± 1800 |
± 20 |
|
Vận tốc dọc |
0 đến 35 m/s |
± 0,3 m/s |
|
Gia tốc ngang |
± 15 m/s2 |
± 0,15 m/s2 |
|
Góc chuyển hướng giữa các xe đơn |
± 300 |
± 0,30 |
|
Vận tốc góc chuyển hướng |
± 500/s |
± 0,50/s |
|
Vận tốc chuyển hướng |
± 500/s |
± 0,50/s |
|
Dịch chuyển ngang của điểm trên đường tâm trục xe so với quỹ đạo của điểm trên đường tâm trục trước |
± 10 m |
± 0,05 m |
|
Tải trên bánh xe |
0 đến giá trị tải danh định trên trục |
± 2 % toàn bộ thang đo |
|
Góc lắc ngang |
± 150 |
± 0,20 |
|
Vận tốc ngang |
± 10 m/s |
± 0,2 m/s |
|
Góc trượt |
± 10° |
± 0,50 |
Một số bộ chuyển đổi đã nêu không có nhiều và không được sử dụng rộng rãi. Nhiều thiết bị đo như vậy do người sử dụng tự hoàn thiện. Nếu có bất kỳ sai số hệ thống nào vượt quá giá trị lớn nhất theo yêu cầu trên thì phải được nêu cùng với sai số hệ thống thực tế trong trình bày số liệu tổng quát.
5.2 Lắp đặt bộ chuyển đổi
Có thể đo biến số một cách trực tiếp hoặc gián tiếp. Nếu bộ chuyển đổi không đo được biến số theo yêu cầu một cách trực tiếp thì phải hiệu chỉnh tín hiệu dịch chuyển thẳng và dịch chuyển góc một cách thích hợp để đạt được độ chính xác theo yêu cầu.
Bộ chuyển đổi đo gia tốc ngang phải được lắp trên khối đàn hồi.
Một cách tùy chọn, có thể lắp bộ chuyển đổi đo gia tốc ngang trục trước của xe đơn đi đầu tiên trên trục trước nếu là trục đặc. Trong trường hợp này, phải lắp bộ chuyển đổi tại vị trí có chiều cao bằng hoặc thấp hơn chiều cao tâm bánh xe và không cần phải hiệu chỉnh tín hiệu từ bộ chuyển đổi này do sai số liên quan đến sự lắc.
5.3 Xử lý số liệu
5.3.1 Yêu cầu chung
Miền tần số liên quan đến các phép thử này nằm giữa 0 và tần số sử dụng lớn nhất fmax= 2 Hz. Tùy theo phương pháp xử lý số liệu được chọn, nghĩa là xử lý theo phương pháp tương tự (analog) hoặc số (digital) mà tuân theo các quy định dưới đây.
5.3.2 Xử lý số liệu tương tự
Chiều rộng dải tần của toàn bộ hệ thống liên hợp bộ chuyển đổi /máy ghi không được nhỏ hơn 8 Hz.
Để lọc các tín hiệu cần thiết, bắt buộc phải sử dụng bộ lọc thông lượng thấp tối thiểu là cấp 4. Chiều rộng dải thông (- 3 dB tại tần số f0) không được nhỏ hơn 8 Hz. Phải đạt được sai số biên độ nhỏ hơn ± 0,5% trong miền tần số tương ứng từ 0 đến 2 Hz. Phải xử lý toàn bộ tín hiệu tương tự bằng bộ lọc có đặc tính pha tương tự thích hợp để đảm bảo chênh lệch thời gian trễ do lọc nằm trong phạm vi độ chính xác cần thiết của phép đo thời gian.
Chú thích: Sự chuyển pha có thể xảy ra trong lúc lọc tín hiệu tương tự với mức tần số khác nhau. Vì vậy, phương pháp xử lý số liệu được nêu ở 5.3.2 là thích hợp .
5.3.3 Xử lý số liệu số
5.3.3.1 Chuẩn bị tín hiệu tương tự
Để không bị méo tín hiệu, phải lọc tín hiệu tương tự trước khi số hóa. Trong trường hợp này, phải sử dụng bộ lọc thông lượng thấp tối thiểu là cấp 4. Chiều rộng dải thông (- 3 dB tại tần số f0) phải là f0 > 5fmax.
Sai số biên độ của bộ lọc chống méo không được vượt quá ± 0,5 % trong miền tần số sử dụng từ 0 đến fmax. Tất cả tín hiệu tương tự phải được xử lý bằng bộ lọc chống nhiễu có đặc tính pha tương tự thích hợp đảm bảo chênh lệch thời gian trễ nằm trong giới hạn độ chính xác cần thiết đối với phép đo thời gian. Không được có thêm các bộ lọc trong hệ thống thu nhận số liệu.
Sự khuyếch đại tín hiệu phải bảo đảm trong quá trình số hóa, sai số phụ phải nhỏ hơn 0,2 %.
5.3.3.2 Số hóa
Phải bảo đảm tần suất lấy mẫu fs để sự suy giảm của bộ lọc chống nhiễu tại mọi tần số lớn hơn fs - fmax tối thiểu là 60 dB.
Để không vượt quá sai số biên độ là 0,5% trong miền tần số tương ứng từ 0 đến fmax, tần suất lấy mẫu fs tối thiểu phải là 30fmax.
5.3.3.3 Lọc số
Để lọc số liệu mẫu trong đánh giá số liệu, sử dụng bộ lọc số không pha (sự chuyển pha 0) có các đặc tính sau (xem Hình 1):
- dải thông phải nằm trong phạm vi từ 0 đến 2 Hz;
- dải dừng phải bắt đầu từ <>
- độ khuyếch đại của bộ lọc trong dải thông phải là 1 ± 0,005 (100 % ± 0,5 %);
- độ khuyếch đại của bộ lọc trong dải dừng phải < 0,01=""><1>
- độ khuyếch đại của bộ lọc giữa dải thông và dải dừng phải giảm càng nhanh càng tốt.
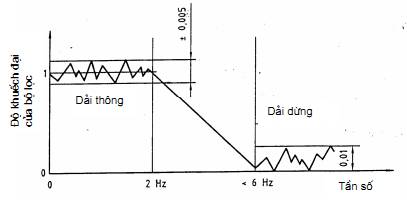
Hình 1. Đặc tính bộ lọc số
6 Điều kiện thử
6.1 Đường thử
Phải tiến hành tất cả phép thử trên bề mặt cứng đồng nhất không bị bẩn và có độ dốc không lớn hơn 2 % theo mọi hướng khi đo trên đoạn đường dài tối thiểu 5 m và độ dốc không lớn hơn 1 % khi đo trên đoạn đường dài tối thiểu 25 m dọc theo hướng đi của xe. Đối với điều kiện thử tiêu chuẩn thì phải có bề mặt khô, bằng phẳng bằng bêtông asphal hoặc bêtông ximăng hoặc bề mặt có độ ma sát lớn.
Vận tốc gió xung quanh không được quá 5 m/s. Vận tốc và hướng gió phải được ghi vào biên bản thử.
Phải đảm bảo bề mặt thử đạt yêu cầu trên chiều rộng đường thử tối thiểu là 8m. Đối với phép thử tín hiệu đầu vào giả định ngẫu nhiên, chiều dài đường thử phải đủ để cho xe chạy trong thời gian tối thiểu 30 s ở vận tốc thử không kể quãng đường chạy lấy đà và quãng đường phanh theo quy định.
Sự tắt dần dao động của tổ hợp xe khi chuyển hướng chịu ảnh hưởng của độ nghiêng dọc của bề mặt thử. Khi độ nghiêng này đạt đến giá trị lớn nhất cho phép (1 %), cần tiến hành thử theo cả hai hướng. Kết quả được lấy trung bình như trong 8.4.2.
6.2 Lốp xe
Trong điều kiện thử tiêu chuẩn, lốp xe đã chạy được tối thiểu là 200 km, chiều sâu hoa lốp tối thiểu phải đạt 90 % của lốp mới trên toàn bộ chiều rộng của bề mặt và chu vi lốp. Lốp phải được bảo quản theo yêu cầu của nhà sản xuất và không được sản xuất quá hai năm trước khi thử. Ngày sản xuất của tất cả lốp phải được ghi vào biên bản thử.
Chiều sâu hoa lốp không được mòn quá 2 mm khi thử. Chiều sâu và độ mòn hoa lốp phải được ghi vào biên bản thử.
Lốp phải được bơm căng đến đủ áp suất theo quy định của nhà sản xuất xe ở nhiệt độ môi trường xung quanh. Sai lệch áp suất khi bơm căng ở trạng thái nguội là ± 2 %.
Vì chiều sâu hoa lốp có thể ảnh hưởng đáng kể đến kết quả thử nên cần được tính đến khi so sánh xe hoặc lốp.
6.3 Các bộ phận khác có liên quan
Tất cả các bộ phận của xe có khả năng ảnh hưởng đến kết quả thử (ví dụ như giảm chấn, lò xo và các chi tiết của hệ thống treo) phải được kiểm tra đáp ứng yêu cầu kỹ thuật của nhà sản xuất xe và được điều chỉnh thích hợp, định vị chắc chắn. Phải ghi lại các kết quả đo và kiểm tra này và đặc biệt là phải ghi chú các sai lệch bất kỳ so với yêu cầu kỹ thuật của nhà sản xuất trong trình bày số liệu tổng quát.
6.4 Điều kiện chất tải
6.4.1 Điều kiện chung
Trong mọi trường hợp khối lượng toàn bộ và tải trên trục không được vượt quá giá trị thiết kế lớn nhất của nhà sản xuất được định nghĩa trong TCVN 6529:1999.
Tải trên trục, chiều cao trọng tâm, khối lượng toàn bộ và mômen quán tính chuyển hướng có thể là những yếu tố ảnh hưởng đến kết quả thử. Tất cả các thông số này phải được ghi vào biên bản thử.
Cần đảm bảo vị trí trọng tâm và giá trị mômen quán tính đại diện cho điều kiện chất tải bình thường trong sử dụng.
6.4.2 Điều kiện chất tải lớn nhất
Trong điều kiện chất tải lớn nhất, khối lượng toàn bộ xe đầy tải phải bao gồm khối lượng bản thân xe hoàn chỉnh (xem 6.4.1) cộng với tải lớn nhất của xe, được phân bố bảo đảm không vượt quá tải lớn nhất trên trục. Chiều cao trọng tâm và sự phân bố khối lượng của tải phải được xác lập để phản ánh tác động của tải và được ghi rõ ràng đầy đủ để xác định vị trí trọng tâm trong hệ tọa độ ba chiều và mômen quán tính chuyển hướng. Điều kiện chất tải lớn nhất là điều kiện thử chuẩn.
6.4.3 Điều kiện chất tải nhỏ nhất
Khối lượng toàn bộ của mỗi xe đơn trong điều kiện chất tải nhỏ nhất phải bao gồm khối lượng bản thân xe hoàn chỉnh (xem TCVN 6529:1999) cộng thêm khối lượng của dụng cụ thử. Đối với xe đơn đi đầu tiên thì phải cộng thêm khối lượng của người lái và nếu có thể áp dụng, khối lượng của người vận hành dụng cụ thử hoặc người quan sát. Điều kiện chất tải nhỏ nhất là tùy chọn.
6.4.4 Điều kiện chất tải khác
Khuyến khích sử dụng các điều kiện chất tải khác mô phỏng những điều kiện vận chuyển riêng biệt.
7 Phương pháp thử
7.1 Làm nóng
Xe phải được làm nóng trước khi thử bằng cách chạy ở vận tốc thử trên quãng đường dài tối thiểu 10 km.
7.2 Vận tốc thử
Phải tiến hành tất cả các phép thử, không kể thử tín hiệu đầu vào dạng xung trong 7.6 ở vận tốc 80 km/h, 90 km/h hoặc 100 km/h tùy thuộc vào mục đích sử dụng xe, hoặc tại vận tốc lớn nhất của xe nếu nhỏ hơn 80 km/h. Khuyến khích thử ở vận tốc cao hơn.
Trong mỗi lần chạy thử, phải duy trì vận tốc trung bình trong khoảng dung sai ± 2 km/h so với vận tốc đã chọn. Cho phép sai số vận tốc xe là ± 3 km/h so với tốc đã chọn.
7.3 Gia tốc ngang
Trong tất cả các phép thử chuyển hướng, kiến nghị giá trị gia tốc ngang lớn nhất của xe đơn đi đầu tiên là 2 m/s2, nhưng có thể được giảm xuống đến không lớn hơn 75 % giới hạn lắc dự kiến và không lớn hơn 75% giới hạn ma sát lốp bất kỳ do hạn chế trong sự đáp ứng của xe đơn đi sau cùng. Đối với thử nghiệm tín hiệu đầu vào giả định ngẫu nhiên, có thể giảm gia tốc ngang lớn nhất hơn nữa để giữ tất cả xe đơn nằm trong chế độ tuyến tính.
Cần thực hiện tăng gia tốc ngang theo từng nấc và sử dụng dầm ngang ở thành phần cuối cùng của tổ hợp xe để ngăn chặn sự lắc.
7.4 Tín hiệu vào giả định ngẫu nhiên
Tiến hành chạy thử ở vận tốc quy định và tạo được tín hiệu vào liên tục lên vành tay lái đến giới hạn đã định của biên độ vành tay lái. Giới hạn được xác định đối với mức gia tốc ngang nằm trong phạm vi xe hoạt động ở chế độ tuyến tính. Giới hạn này áp dụng cho tất cả xe đơn trong tổ hợp xe.
Không được có bất kỳ sự cản trở chuyển động nào đối với vành tay lái vì sẽ gây ảnh hưởng đến việc điều hòa tín hiệu vào. Điều quan trọng là tín hiệu vào phải liên tục vì những chu kỳ không hoạt động làm giảm đáng kể tỷ số tín hiệu/độ ồn.
Miền tần số của tín hiệu lái đầu vào phải từ 0,1 Hz đến giá trị cao nhất có thể nhưng tối thiểu là 1,0 Hz. Tín hiệu vào phải đủ mạnh để đảm bảo mức tần số cao thích ứng. Cả tần số và biên độ của tín hiệu vào phải được thay đổi ngẫu nhiên.
Để đảm bảo có đầy đủ toàn bộ số liệu, cần phải có tối thiểu 12 phút lấy số liệu trừ khi giới hạn tin cậy chỉ ra thời gian ngắn hơn hoặc dài hơn. Một cách lý tưởng thì phải chạy liên tục, nhưng trên thực tế có thể không thực hiện được vì hai lý do. Thứ nhất, đường thử không đủ dài để cho phép chạy liên tục; thứ hai là máy tính dùng để phân tích dữ liệu có thể không đủ mạnh để xử lý toàn bộ số liệu trong một lần. Dù trong trường hợp nào thì cũng cho phép sử dụng đoạn đường chạy ngắn hơn trong khoảng thời gian tối thiểu 30 s.
7.5 Chuyển làn đường đơn
7.5.1 Yêu cầu chung
Lái xe ở vận tốc thử trên đường thẳng với vận tốc chuyển hướng tức thời bằng (0 ± 0,5) 0/s ngay trước khi thực hiện chuyển làn đường.
Tiến hành thử ở ít nhất 3 tần số với khoảng cách lớn nhất giữa các tần số là 0,1 Hz. Tần số phải được chọn để không xuất hiện hệ số mở rộng phía sau lớn nhất ở tấn số cực hạn.
Bắt buộc phải có một đợt ít nhất gồm 3 lần chạy thử đạt yêu cầu đối với mỗi cặp giá trị vận tốc và tần số. Có thể tiến hành chạy thêm khi cần thiết.
Nên thực hiện phép đo cho cả quay vòng trái và quay vòng phải.
7.5.2 Tín hiệu lái đầu vào dạng sóng hình sin đơn
Tác dụng trong 5 s, một chu kỳ đầy đủ tín hiệu lái đầu vào dạng hình sin với biên độ vành tay lái xác định trước ở vị trí lái tiến thẳng. Sai số biên độ cho phép so với sóng hình sin thật là ± 5% của giá trị cực đại thứ nhất. Để thu được và có thể tái tạo lại được kết quả một cách chính xác thì nên dùng máy lái. Cần chú ý đến sự an toàn của hệ thống.
7.5.3 Tín hiệu gia tốc ngang đầu vào dạng sóng hình sin đơn
Xe phải đi theo đường thử được đánh dấu bảo đảm điểm được chọn trên trục trước không sai lệch quá ± 0,15 m so với quỹ đạo yêu cầu được xác định bởi đường thử. Giá trị cực đại trung bình của gia tốc ngang trục trước của xe đơn đi đầu tiên không được có sai lệch chuẩn tiêu biểu lớn hơn 0,2 m/s2 và giá trị trung bình của nó phải nằm trong phạm vi 10% của gia tốc ngang cần có.
Đường thử gồm đoạn đường thẳng chuẩn bị xuất phát, đoạn đường thẳng đầu tiên, đoạn đường chuyển hướng và đoạn đường thoát. Sơ đồ thử được trình bày trên Hình 2. Quỹ đạo mong muốn phải được đánh dấu trên bề mặt thử đảm bảo thuận lợi để đo sự tuân theo quỹ đạo. Kỹ thuật lái xe và phương pháp kiểm tra xác nhận sự tuân theo quỹ đạo cũng như phương pháp đo độ dịch chuyển bên được mô tả trong phụ lục C.
Các tọa độ, x và y (có đơn vị là mét), của đoạn chuyển hướng trên đường thử ứng với gia tốc ngang lớn nhất ay (m/s2), vận tốc thử v (m/s) và tần số f (Hz) liên hệ với nhau theo phương trình sau:
Chú thích: Độ lệch cho phép so với quỹ đạo quy định có thể dẫn tới sai khác đáng kể của kết quả so với quỹ đạo lý tưởng, đặc biệt là ở những tần số cao hơn. Bởi vậy, nên sử dụng phương pháp chuyển làn đường đơn có tín hiệu lái đầu vào dạng sóng hình sin nếu sử dụng máy lái.
7.6 Tín hiệu vào dạng xung
7.6.1 Yêu cầu chung
Cần tiến hành thử nghiệm hoặc phân tích sơ bộ để xác định khả năng chất lượng tổng thể của xe đáp ứng tín hiệu lái đầu vào dạng xung. Thử tín hiệu vào dạng xung thích hợp cho xe được giảm chấn nhẹ, biểu hiện ở phản ứng dao động được duy trì. Quá trình từ lúc xe được giảm chấn mạnh mà phản ứng của nó bị dập tắt nhanh chóng là không thích hợp với phương pháp rút gọn số liệu được trình bày trong 8.4.
7.6.2 Xác định vận tốc tắt dần - 0 ước tính
Cần tiến hành thử hoặc phân tích sơ bộ để có ước tính ban đầu của vận tốc tắt dần - 0. Điều này có thể thực hiện được bằng cách lái tổ hợp xe tăng tốc theo từng bậc và tác dụng tín hiệu lái để rơ moóc dao động. Phải tiếp cận vận tốc tắt dần - 0 một cách thận trọng sử dụng tín hiệu lái đầu vào một cách điều độ. Có thể ước tính vận tốc tắt dần - 0 trên cơ sở kết quả của những lần chạy thử đầu tiên.
7.6.3 Vận tốc thử xác định trước
Phải tiến hành thử ở vận tốc thử được xác đinh trước. Vận tốc thử nhỏ nhất là vận tốc tắt dần - 0 ước tính hoặc 40 km/h theo giá trị nào cao hơn. Thực hiện thử ở vận tốc bổ sung với số gia không lớn hơn 20% chênh lệch giữa vận tốc thử nhỏ nhất và vận tốc thử tắt dần - 0 ước tính.
7.6.4 Chạy thử
Tiến hành chạy thử bằng cách lái tổ hợp xe ở vận tốc thử xác định trước (xem 7.6.3) ở trạng thái ổn định, hướng thẳng về phía trước. Để giảm thiểu sai số do phép ngoại suy tuyến tính (xem 8.4.2), vận tốc thử cao nhất phải đạt tối thiểu 90% vận tốc tắt dần - 0 có được do điều chỉnh đường cong. Để đảm bảo chính xác, phải tiến hành ít nhất 3 lần chạy thử ở vận tốc này và ở mỗi vận tốc thử xác định trước.
Hình 2 - Sơ đồ đường thử
7.6.5 Xung lực lái
Phải tạo ra dao động của rơ mooc, sơmi rơmoóc bắt đầu bằng việc tác dụng xung lực lái đều trong khoảng thời gian bằng hoặc nhỏ hơn 0,6 s vào xe đơn đầu tiên. Độ lớn góc vành tay lái phải đảm bảo tạo ra gia tốc ngang lớn nhất theo 7.3. Xung lực lái có thể được thực hiện bằng cách quay trực tiếp vành tay lái đến vị trí ban đầu của nó như trên Hình 3 a) hoặc bằng cách chỉnh lái tiếp sau theo hướng ngược lại như trên Hình 3 b) để xe đơn đầu tiên tiếp cận lại quỹ đạo ban đầu của nó. Sau khi tác dụng xung lực lái và bất kỳ sự chỉnh lái tiếp sau, vành tay lái phải được giữ cố định ở vị trí xe tiến thẳng. Khoảng thời gian chỉnh lái (t2 - t1) không được quá 1,5 s.
Thời điểm t2 được xác định là thời điểm kể từ sau đó góc vành tay lái được duy trì trong khoảng giới hạn được xác định bởi dung sai cần thiết (nghĩa là ± d2max).
Bắt đầu từ thời điểm t2, độ lệch trung bình d1 của góc vành tay lái tính từ vị trí xe hướng thẳng về phía trước không được quá ± 10 % biên độ xung lực lái ban đầu. Dao động (d2) không được vượt quá lượng bổ sung ± 5 % của xung lực lái ban đầu.
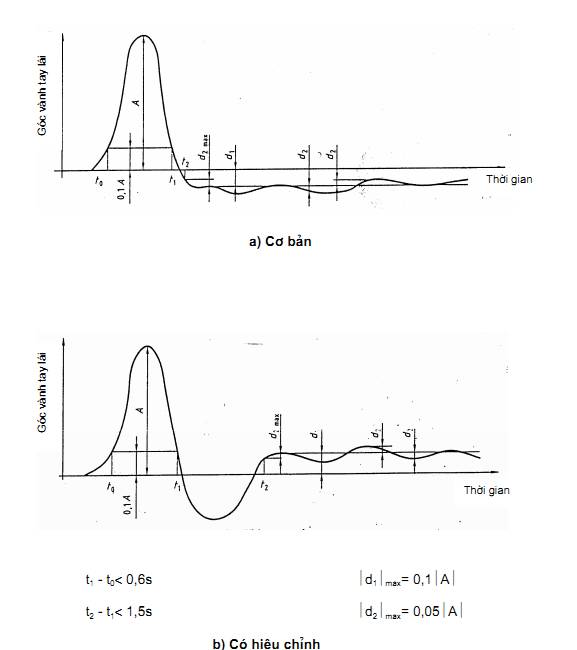
Hình 3 - Xung lực lái
8 Phân tích và trình bày số liệu
8.1 Phân tích sơ bộ
Khoảng thời gian ghi tín hiệu phải được hiển thị và kiểm tra bằng quan sát. Loại bỏ những kết quả không đạt yêu cầu về vận tốc dọc và gia tốc ngang hoặc không phải là giá trị tiêu biểu. Giá trị 0 của tín hiệu cần được giám sát cẩn thận vì không dễ dàng xóa được độ lệch đã ghi.
8.2 Hệ số mở rộng phía sau
8.2.1 Yêu cầu chung
Trong phép thử tiêu chuẩn, hệ số mở rộng phía sau của gia tốc ngang và vận tốc chuyển hướng giữa xe đơn đầu tiên và sau cùng được xác định. Các kết quả từ phương pháp thử tín hiệu vào giả định ngẫu nhiên và chuyển làn đường đơn là khác nhau. Các kết quả từ hai phương pháp chuyển làn đường đơn cũng sẽ khác nhau.
8.2.2 Tín hiệu vào giả định ngẫu nhiên
Thực hiện phân tích quang phổ phải bằng quá trình thời gian của góc quay vành tay lái. Mức tần số phải tương ứng. Tỷ số giữa góc vành tay lái lớn nhất và nhỏ nhất trong dải quang phổ không được lớn hơn 4:1.
Chức năng liên kết cũng phải được thiết lập. Nếu tổ hợp xe hoạt động trong phạm vi tuyến tính và không có độ ồn ngoài trong tín hiệu thì liên kết gần với đồng nhất. Giá trị đo được chấp nhận nếu liên kết đạt tối thiểu 0,95 tại tần số lân cận của hệ số mở rộng phía sau lớn nhất.
Phải tính toán mức độ khuyếch đại của chức năng đáp ứng tần số giữa tín hiệu của xe đơn đầu tiên và cuối cùng. Nếu một số lần chạy ngắn được thay cho một lần chạy dài thì có thể lấy trung bình cộng của các kết quả tính toán.
Hệ số mở rộng phía sau lớn nhất là độ khuyếch đại lớn nhất. Phải xác định tần số tại đó đạt được độ khuyếch đại lớn nhất.
Độ khuếch đại, sự liên kết và biên độ vành tay lái phải được lập đồ thị theo tần số và được hiển thị. Chiều rộng dải phân tích Be, thời gian đo ttot và thời gian ghi phải được ghi vào biên bản thử. Xem phụ lục B.
8.2.3 Chuyển làn đường đơn
Tín hiệu mẫu được lọc bằng bộ lọc số có đặc tính lọc theo 5.3.3.3.
Giá trị lớn nhất của tín hiệu được xác định từ quá trình thời gian của chúng. Giá trị lớn nhất đối với mỗi xe đơn là giá trị cực đại tuyệt đối lớn nhất.
Hệ số mở rộng phía sau là giá trị lớn nhất của xe đơn sau cùng chia cho giá trị lớn nhất của xe đơn đầu tiên. Giá trị hệ số mở rộng phía sau được tính toán và lưu giữ cho mỗi lần chạy được chấp nhận. Khoảng tin cậy 95 % đối với hệ số mở rộng phía sau phải được xác định cho mỗi tổ hợp xe tương ứng về vận tốc và tần số thử. Kết quả phải được trình bày như sau
![]()
ở đây RAf,v là hệ số mở rộng phía
sau của tổ hợp xe đặc trưng về vận tốc (v) và tần số (f). ![]() là giá trị trung bình của hệ số mở
rộng phía sau trên cơ sở những lần chạy riêng rẽ tại vận tốc và tần số đó. Còn
HI(
là giá trị trung bình của hệ số mở
rộng phía sau trên cơ sở những lần chạy riêng rẽ tại vận tốc và tần số đó. Còn
HI(![]() ) là một nửa chiều rộng của khoảng tin
cậy 95 % của giá trị trung bình đó (xem phụ lục D).
) là một nửa chiều rộng của khoảng tin
cậy 95 % của giá trị trung bình đó (xem phụ lục D).
Hệ số mở rộng phía sau lớn nhất cho vận tốc
đặc trưng RAmax,v là giá trị lớn nhất của ![]() với
khoảng tin cậy tương ứng được xác định từ phép thử ở vận tốc đó trên toàn bộ
giá trị của f.
với
khoảng tin cậy tương ứng được xác định từ phép thử ở vận tốc đó trên toàn bộ
giá trị của f.
Hệ số mở rộng phía sau lớn nhất phải được xác định và ghi vào biên bản thử cho toàn bộ vận tốc thử cùng với khoảng tin cậy và quá trình thời gian kèm theo (xem phụ lục B).
8.3 Dịch chuyển bên
Để xác định dịch chuyển bên chuyển tiếp từ sự chuyển làn đường đơn thì phải đo khoảng cách ngang
(theo hướng yE) giữa quỹ đạo tâm trục trước và tâm trục có độ dịch chuyển bên lớn nhất của xe đơn cuối cùng. Nếu một số liệu đơn cho trước thì phải là dịch chuyển bên lớn nhất. Nếu xe đơn cuối cùng dịch chuyển thừa so với quỹ đạo của xe đơn đầu tiên, mức dịch chuyển thừa lớn nhất phải được ghi lại. Nếu quỹ đạo của xe đơn cuối cùng không dịch chuyển thừa thì phải ghi lại giá trị lớn nhất của dịch chuyển thiếu.
8.4 Vận tốc tắt dần - 0 và sự tắt dần dao động khi chuyển hướng
8.4.1 Sự tắt dần dao động của góc quay
Tín hiệu thử được lọc bằng bộ lọc số có đặc tính lọc theo 5.3.3.3.
Từ khoảng thời gian của góc chuyển hướng hoặc vận tốc góc chuyển hướng, phải xác định được tất cả biên độ tính từ biên độ thứ ba (xem Hình 4). Nếu giao cắt 0 ở trước biên độ thứ ba xảy ra trước thời điểm t2 (xem 7.6.5), biên độ kế tiếp phải được lấy là A1.
Giá trị trung bình của tỷ số biên độ ![]() phải được tính toán riêng cho mỗi
khớp chuyển hướng, dùng công thức sau:
phải được tính toán riêng cho mỗi
khớp chuyển hướng, dùng công thức sau:

An-1+ An phải tối thiểu 10 % của khớp nối chuyển hướng A1 + A2
Việc tính toán hệ số ![]() phải
dựa trên ít nhất bảy biên độ, trừ khi giới hạn 10 % đạt được trước biên độ thứ
bảy.
phải
dựa trên ít nhất bảy biên độ, trừ khi giới hạn 10 % đạt được trước biên độ thứ
bảy.
Tỷ số tắt dần D được tính toán như sau:

Tỷ số tắt dần phải được lập thành đồ thị như một hàm của vận tốc chạy xe. Xem phụ lục B.
Tỷ số tắt dần được tính toán từ khớp chuyển hướng có mức độ tắt dần nhỏ nhất phải được coi là tỷ số tắt dần của tổ hợp xe.
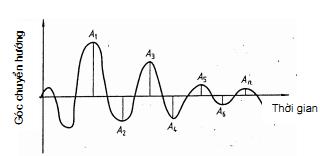
Hình 4 - Xác định biên độ
8.4.2 Vận tốc tắt dần - 0
Vận tốc tắt dần - 0 vzd (km/h) được xác định là vận tốc tại đó sự tắt dần dao động khi chuyển hướng bằng không. Vận tốc tắt dần - 0 phải được xác định từ giá trị ở đồ thị của tỷ số giảm dần theo vận tốc thử bằng cách điều chỉnh đường cong tuyến tính thông qua phép hồi quy như sau:
D = C1 + C2vzd = 0
ở đây C1 và C2 (h/km) là các hệ số hồi quy.
![]()
Phải thực hiện ít nhất ba lần chạy thử ở vận tốc tối thiểu là 90 % vận tốc tắt dần - 0 có được do kết quả điều chỉnh đường cong (xem 7.6.4). Nếu không đáp ứng yêu cầu này hoặc nếu vì lý do an toàn mà việc chạy ở 90 % vận tốc tắt dần - 0 là không khả thi không được sử dụng tiêu chí vận tốc tắt dần - 0 trong trình bày kết quả.
Nếu phải chạy thử theo hai hướng do sự nghiêng dọc của đường thử, giá trị trung bình của tỷ số tắt dần theo hai hướng phải được sử dụng để điều chỉnh đường cong tuyến tính.
8.4.3 Vận tốc tắt dần chuẩn
Vận tốc tắt dần chuẩn được xác định là vận tốc tại đó hệ số tắt dần khi chuyển hướng bằng 0,05. Vận tốc này phải được xác định theo cách giống như vận tốc tắt dần - 0 (xem 8.4.2) bằng công thức sau:
8.4.4 Sự tắt dần dao động ở vận tốc chuẩn
Sự tắt dần dao động ở vận tốc chuẩn được xác định là sự tắt dần dao động tại vận tốc 80 km/h được xác định theo 7.3 bằng công thức sau:
D80 = C1 + 80C2
8.5 Tỷ số vận tốc chuyển hướng
Khi đo vận tốc chuyển hướng của các xe đơn, tính toán tỷ số vận tốc chuyển hướng giữa các xe đơn theo công thức sau
trong đó
Rt/k là tỷ số vận tốc chuyển hướng giữa xe đơn thứ tth và xe đơn thứ kth;
Yk là vận tốc chuyển hướng của xe đơn thứ kth;
Yt là vận tốc chuyển hướng của xe đơn thứ tth;
Để xác định biên độ xem 8.4.1 và Hình 4.
Phụ lục A
(quy định)
Trình bày số liệu tổng quát
Kiểu tổ hợp xe ..................................................................................................................................
Số lượng xe đơn ..............................................................................................................................
Kiểu xe ..............................................................................................................................................
Số nhận dạng xe ..............................................................................................................................
Nhãn hiệu, năm sản xuất, kiểu, số loại: ...........................................................................................
Chỉ số trên đồng hồ vận tốc .............................................................................................................
Trục 1 (trục trước)............................................................................................................................
kiểu hệ thống treo ......................................................................................................................
lốp: ..................................................................................................................................................
chế tạo mới (đắp lại).....................................................................................................................
ngày..........................................................................................................................................
kích cỡ ......................................................................................................................................
chiều sâu hoa lốp ......................................................................................................................
chiều sâu hoa lốp của lốp mới....................................................................................................
số bánh xe ........................................................................................................................................
chiều rộng vệt bánh xe .................................................................................................................m
cỡ vành .............................................................................................................................................
hệ thống lái (tỷ số truyền).................................................................................................................
kiểu dẫn động .................................................................................................................................
Trục n
kiểu hệ thống treo lốp:
Chế tạo mới (đắp lại)....................................................................................................................
Ngày................................................................................................................................................
kích cỡ ..........................................................................................................................................
chiều sâu hoa lốp..............................................................................................................................
chiều sâu hoa lốp của lốp mới....................................................................................................
số bánh xe ......................................................................................................................................
chiều rộng vệt bánh xe....................................................................................................................
cỡ vành ...........................................................................................................................................
kiểu hệ thống lái (tỷ số truyền)........................................................................................................
kiểu dẫn động ..................................................................................................................................
áp suất bơm căng lốp (kPa)
|
Nguội |
Trục 1 |
Trục n |
|
Nóng, sau khi làm nóng |
Trục 1 |
Trục n |
|
Nóng, sau khi thử |
Trục 1 |
Trục n |
Khoảng cách giữa các trục:
Trục 1 - trục 2 ..............................................................................................................................m
Trục (n- 1) - trục n ........................................................................................................................m
Khoảng cách giữa trục 1 và khớp nối sau.....................................................................................m
Khoảng cách giữa trục 1 và khớp nối trước ..................................................................................m
Chiều cao từ khớp nối đến mặt đất (trong điều kiện chất tải)……..................................................m
Các số liệu khác (cụ thể là việc lắp đặt hệ thống treo cùng các chi tiết liên quan):
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
Điều kiện chất tải xe
Khối lượng bản thân xe
Trục 1: bánh xe trái.......................................... kg .bánh xe phải.....................................kg
Trục n: bánh xe trái.......................................... kg bánh xe phải.....................................kg
Khối lượng xe khi thử
trục 1: bánh xe trái.........................................kg bánh xe phải....................................kg
Trục n: bánh xe trái......................................................kg bánh xe phải.....................................kg
Tải tĩnh trên khớp nối trước của xe đơn …………....................................................................N
Tải tĩnh trên khớp nối sau của xe đơn …………...................................................................... N
Chiều cao từ trọng tâm đến mặt đất ....................................................................................m
Mômen quán tính của chuyển hướng ………………..........................................................kgm2
Điểm đặt gia tốc ngang:
chiều cao.......................................................................................................................................m
khoảng cách giữa trục 1/ khớp nối trước........................................................................................m
Mô tả tải trọng................................................................................................................................
Điều kiện thử
Đường thử..............................................................................................................................
mô tả bề mặt ...............................................................................................................................
độ nghiêng ngang......................................................................................................................%
độ nghiêng dọc...............................................................................................................................%
Điều kiện thời tiết
nhiệt độ........................................................................................................................................0C
vận tốc gió................................................................................................................................. m/s
hướng gió liên quan đến hướng chuyển động................................................................................ 0
Điểm chuẩn cho góc trượt ngang và vận tốc ngang.........................................................................
Phương pháp thử
trong miền thời gian.................................................................................................................
trong miền tần số..........................................................................................................................
Người thử:
lái xe ............................................................................................................
người giám sát........................................................................................................................
người phân tích số liệu......................................................................................................................
Nhận xét chung: .....................................................................................................................
Phụ lục B
(quy định)
Trình bày kết quả
B.1 Hệ số mở rộng phía sau
B.1.1 Tín hiệu vào giả định ngẫu nhiên
Vận tốc dọc = (km/h)
Chiều rộng dải phân tích = (Hz)
Tổng thời gian đo = (s) Thời gian ghi = (s)
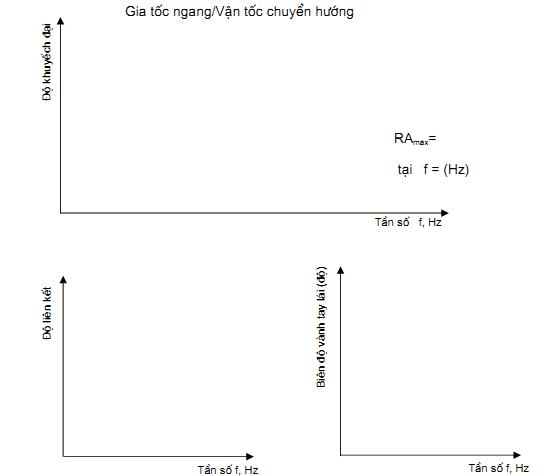
 Hình B.1
Hình B.1
B.1.2 Sự chuyển làn đường đơn
Tín hiệu lái dạng sóng hình sin đơn/Tín hiệu gia tốc ngang đi theo quỹ đạo
Vận tốc dọc = (km/h)
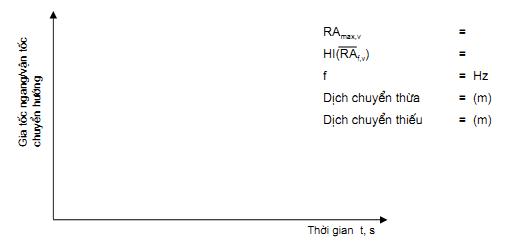
Hình B.2
B.2 Sự tắt dần của dao động khi chuyển hướng
Tín hiệu dạng xung

Hình B.3
Phụ lục C
(tham khảo)
Kỹ thuật và việc kiểm tra xác nhận sự theo đúng quỹ đạo
C.1 Yêu cầu chung
Phụ lục này mô tả một phương pháp rất đơn giản, bao gồm "dụng cụ", có thể dùng để trợ giúp lái xe đi theo đúng quỹ đạo yêu cầu đối với phương pháp chuyển làn đường đơn theo quỹ đạo và kiểm tra xác nhận quỹ đạo thực tế của trục trước nằm trong giới hạn yêu cầu của phương pháp. Hệ thống cũng cho phép đo độ dịch chuyển bên lớn nhất của trục sau xe so với quỹ đạo trục trước.
C.2 Kỹ thuật chạy xe
Cách xác định đường thử được trình bày trong 7.5.3. Ví dụ, đường thử có thể được đánh dấu bằng các tấm mỏng như trên Hình C.1. Hình dạng của chúng cùng với dụng cụ được mô tả trong [2] của Thư mục.
Đầu nhọn của các dấu hiệu này trợ giúp cho lái xe trong việc điều khiển xe trong giới hạn dịch chuyển ngang theo yêu cầu. Kích thước ngang của dấu hiệu bằng với vị trí ngang cho phép của trục thứ nhất của xe được thử.
Hướng dẫn cơ bản dùng cho người lái xe thử đơn giản là đi theo quỹ đạo, theo cách để các dấu hiệu dẫn đường đi qua thẳng phía dưới ghế người lái. Để trợ giúp việc này, người lái được phép đặt các vạch mốc quan sát được (chẳng hạn như thước) trên kính chắn gió hoặc ở một chỗ nào đó để giúp người lái ngắm thẳng xe theo đường thử. Người lái phải được thực hành để thành thạo khi chạy xe theo đường thử.
C.3 Kiểm tra xác nhận
Hệ thống phun bụi nước rất đơn giản được dùng để đánh dấu quĩ đạo của trục đầu tiên và trục sau cùng trong khi thử. Hệ thống sử dụng thiết bị phun được lắp vào để tạo ra luồng nước trực tiếp lên bề mặt đường từ vòi phun lắp trên trục. Hệ thống để lại dấu nước được xác định rõ thể hiện quỹ đạo của trục. Với vòi phun được lắp trên trục đầu tiên và trục sau cùng, có thể xác định quỹ đạo trục thứ nhất và khoảng dịch chuyển tương đối (dịch chuyển bên) của trục sau cùng. Lượng nước phun ra được điều chỉnh để đảm bảo chiều dài đánh dấu đủ cho các phép đo cần thiết, nhưng sự bay hơi nhanh cho phép lặp lại cùng đường thử mà không lẫn với những dấu hiệu trước đó.
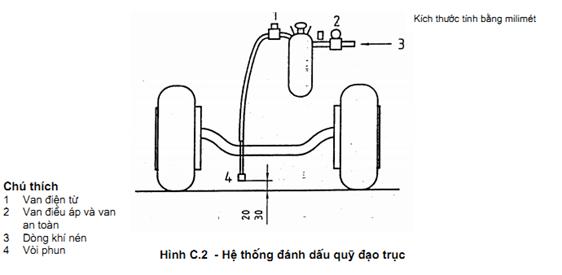
C.4 Dụng cụ phun
Sơ đồ nguyên lý của hệ thống cho một trục được thể hiện trên Hình C.2. Ví dụ, hệ thống có thể dựa trên bộ phận phun là bơm tay thường dùng trong vườn.
Bình chứa của bộ phận phun được thay đổi để tạo ra dòng áp lực không khí vào nằm trên mức nước.
Đường áp lực vào này được điều chỉnh và được trang bị van an toàn để ngăn sự quá áp trong bình chứa.
Đường thoát có thể được trang bị van điện từ có nút bấm được gắn trên ca bin để điều khiển cuộn dầy điện từ ở cả trục trước và trục sau.

C.5 Chỉnh thẳng hệ thống trục trước
Việc chỉnh thẳng vòi phun trên trục trước được thực hiện như sau. Nguyên tắc chung là sắp xếp hệ thống đánh dấu theo ý thích của người lái xe trong việc chỉnh thẳng xe trên đường thử để người lái không phải quan tâm đến việc xe đến việc xếp thẳng dụng cụ đánh dấu.
Bộ dụng cụ đánh dấu quỹ đạo được sắp xếp trên bề mặt đường thử theo một đường thẳng. Người lái được chỉ dẫn lái xe đi theo đường thẳng đi trên các dấu hiệu ở vận tốc thấp cho đến khi người lái cảm thấy xe đã được chỉnh thẳng trên các dấu. Sau đó người lái được yêu cầu dừng xe ngay trên dấu hiệu và vòi phun nước được điều chỉnh ngang cho thẳng với tâm của dấu.
Tiếp theo, người lái xe được yêu cầu lái xe trên cùng đoạn đường thẳng có các dấu ở vận tốc thử và sử dụng hệ thống đánh dấu bằng nước trong quá trình này. Nếu cần thiết, vị trí ngang của vòi phun sẽ được điều chỉnh để đạt được điều kiện ở đó vị trí dấu nước ở chính giữa trên dấu hiệu.
Khi chỉnh thẳng xong, lần chạy thử được coi là hợp lệ nếu dấu nước trục trước đi qua một phần của mỗi dấu hiệu trên đường thử.
C.6 Chỉnh thẳng hệ thống trục sau
Việc sử dụng thuật ngữ "chỉnh thẳng" ở đây không được chính xác. Thuật ngữ "căn chỉnh 0" sẽ chính xác hơn. Phương pháp xác định dịch chuyển bên từ dấu nước trục đầu tiên và trục sau cùng là không cố xếp đặt hoàn chỉnh hai dấu hiệu, nhưng hơn thế là xác định xê dịch bù của hai dấu hiệu khi xe đang di chuyển theo đường thẳng và sử dụng kích thước này như là điều kiện chuẩn để hiệu chỉnh phép đo sai lệch bù trong điều kiện động học. Phương pháp được dùng như sau.
Sau khi chỉnh thẳng vòi phun trục trước, vị trí ngang của vòi phun trục sau được điều chỉnh gần ngang bằng với vị trí ngang của vòi phun trục trước. Sau đó người lái xe được yêu cầu điều khiển xe trên đoạn đường thẳng ở vận tốc thử và sử dụng cả hai bộ đánh dấu nước trong lúc chạy thử. Việc này phải làm vài lần và sau mỗi lần xe đi qua, dịch chuyển ngang của dấu trục sau so với dấu trục trước được đo tại vài vị trí dọc theo đường thẳng. Giá trị trung bình của một vài lần chạy được dùng làm "độ lệch bù" chuẩn của các dấu hiệu.
Trong thời gian thử động lực tiếp theo, dịch chuyển ngang cực đại của hai dấu nước được đo ngay sau mối lần xe đi qua. Sự đáp ứng dao động của xe đơn sau cùng làm cho dễ dàng xác định dấu từ trục nào. Hơn nữa, khoảng dịch chuyển ngang cực đại đã được xác định và phép đo dọc cũng được thực hiện từ điểm đó đến điểm chuẩn đường thử nhằm xác định vị trí điểm dịch chuyển bên lớn nhất dọc theo đường thử.
Phụ lục D
(tham khảo)
Tính toán khoảng tin cậy của hệ số mở rộng phía sau
Giá trị trung bình của hệ số mở rộng phía sau đối với tổ hợp xe đặc trưng về vận tốc và tần số được tính theo

Độ lệch chuẩn thu được từ
Một nửa chiều rộng khoảng tin cậy (95 %) của giá trị trung bình là
![]()
trong đó
v là số phép thử được tiến hành tại vận tốc v và tần số f;
RAf,v,i là hệ số mở rộng phía sau được xác định từ phép thử thứ ith được thực hiện tại vận tốc v và tần số f;
t95 là giá trị của đối tượng nghiên cứu t đối với khoảng tin cậy 95 %. Các giá trị của t95 đối với n trong phạm vi từ 3 đến 10 được cho trong bảng sau:
|
n |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Giá trị của t95 |
4,303 |
3,182 |
2,776 |
2,571 |
2,447 |
2,365 |
2,306 |
2,262 |
THƯ MỤC
[1] SAE J2179, A test procedure for evaluating rearward amplification of multi-articulated vehicles. (SAE J2179, Quy trình thử đánh giá hệ số mở rộng phía sau của xe nhiều khớp nối).
[2] Winkler C.B et al. Heavy vehicle size and weight - Test procedures for minimum safety performance standards. Final technical report, NHTSA, US DOT, contract DTNH22-87-D-17174. University of Michigan Transportation Research Institute. Report No. UMTRI-92-13. April 1992.118 pp. (Winkler C.B. Trọng lượng và kích thước xe hạng nặng - Quy trình thử theo tiêu chuẩn đặc tính an toàn tối thiểu. Báo cáo kỹ thuật, NHTSA, US DOT, hợp đồng số DTNH22-87-D17174. Viện nghiên cứu Giao thông Trường đại học tổng hợp Michigan. Báo cáo số UMTRI-92-13. Tháng Tư năm 1992. 118 pp).