Nội dung toàn văn Tiêu chuẩn quốc gia TCVN 6989-1-5:2008 (CISPR 16-1-5 : 2003) về Yêu cầu kỹ thuật đối với thiết bị đo và phương pháp đo nhiễu và miễn nhiễm tần số rađiô - Phần 1-5: Thiết bị đo nhiễu và miễn nhiễm tần số rađiô - Vị trí thử nghiệm hiệu chuẩn anten trong dải tần từ 30 MHz đến 1000 MHz
TIÊU CHUẨN QUỐC GIA
TCVN 6989-1-5 : 2008
CISPR 16-1-5 : 2003
YÊU CẦU KỸ THUẬT ĐỐI VỚI THIẾT BỊ ĐO VÀ PHƯƠNG PHÁP ĐO NHIỄU VÀ MIỄN NHIỄM TẦN SỐ RAĐIÔ – PHẦN 1-5: THIẾT BỊ ĐO NHIỄU VÀ MIỄN NHIỄM TẦN SỐ RAĐIÔ – VỊ TRÍ THỬ NGHIỆM HIỆU CHUẨN ANTEN TRONG DẢI TẦN TỪ 30 MHZ ĐẾN 1 000 MHZ
Specification for radio disturbances and immunity measuring apparatus and methods – Part 1-5: Radio disturbances and immunity measuring apparatus – Antenna calibration test sites for 30 MHz to 1 000 MHz
Lời nói đầu
TCVN 6989-1-5 : 2008 hoàn toàn tương đương với tiêu chuẩn CISPR 16-1-5: 2003;
TCVN 6989-1-5 : 2008 do Ban kỹ thuật tiêu chuẩn TCVN/TC/E9 Tương thích điện từ biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học và Công nghệ công bố.
Lời giới thiệu
TCVN 6989-1: 2003 (CISPR 16-1) được biên soạn lại thành 5 tiêu chuẩn mới theo phương pháp chấp nhận tiêu chuẩn quốc tế, có tiêu đề chung là “Yêu cầu kỹ thuật đối với thiết bị đo và phương pháp đo nhiễu và miễn nhiễm tần số radio”. Các phần mới của TCVN như sau:
TCVN 6989-1-1: 2008: Thiết bị đo nhiễu và miễn nhiễm tần số radio – Thiết bị đo
TCVN 6989-1-3: 2008: Thiết bị đo nhiễu và miễn nhiễm tần số radio – Thiết bị đo phụ trợ – Công suất nhiễu
TCVN 6989-1-5: 2008: Thiết bị đo nhiễu và miễn nhiễm tần số radio – Vị trí thử nghiệm hiệu chuẩn anten trong dảI tần từ 30MHz đến 1 000MHz.
Trong thời gian chưa có TCVN 6989-1-2 và TCVN 6989-1-4, các nội dung tương ứng trong TCVN 6989-1: 2003 (CISPR16-1) vẫn có hiệu lực áp dụng.
Cấu trúc của bộ tiêu chuẩn quốc tế CISPR 16 gồm 4 phần chia thành 14 tiêu chuẩn như sau:
1) CISPR 16-1-1, Specification for radio disturbance and immunity measuring apparatus and methods – Part 1-1: Radio disturbance and immunity measuring apparatus – Measurement apparatus
2) CISPR 16-1-2, Specification for radio disturbance and immunity measuring apparatus and methods – Part 1-2: Radio disturbance and immunity measuring apparatus – Ancillary equipment – Conducted disturbance
3) CISPR 16-1-3, Specification for radio disturbance and immunity measuring apparatus and methods – Part 1-3: Radio disturbance and immunity measuring apparatus – Ancillary equipment – Disturbance power
4) CISPR 16-1-4, Specification for radio disturbance and immunity measuring apparatus and methods – Part 1-4: Radio disturbance and immunity measuring apparatus – Ancillary equipment – Radiated disturbance
5) CISPR 16-1-5, Specification for radio disturbance and immunity measuring apparatus and methods – Part 1-5: Radio disturbance and immunity measuring apparatus – Antenna calibration test sites for 30 MHz to 1 000 MHz
6) CISPR 16-2-1, Specification for radio disturbance and immunity measuring apparatus and methods – Part 2-1: Methods of measurement of disturbances and immunity – Conducted disturbance measurements
7) CISPR 16-2-2, Specification for radio disturbance and immunity measuring apparatus and methods – Part 2-2: Methods of measurement of disturbances and immunity – Measurements of disturbance power
8) CISPR 16-2-3, Specification for radio disturbance and immunity measuring apparatus and methods – Part 2-3: Methods of measurement of disturbances and immunity – Radiated disturbance measurements
9) CISPR 16-2-4, Specification for radio disturbance and immunity measuring apparatus and methods – Part 2-4: Methods of measurement of disturbances and immunity – Immunity measurements
10) CISPR 16-3, Specification for radio disturbance and immunity measuring apparatus and methods – Part 3: CISPR technical reports
11) CISPR 16-4-1, Specification for radio disturbance and immunity measuring apparatus and methods – Part 4-1: Uncertainties, statistics and limit modelling – Uncertainties in standardized EMC tests
12) CISPR 16-4-2, Specification for radio disturbance and immunity measuring apparatus and methods – Part 4-2: Uncertainties, statistics and limit modelling – Uncertainties in EMC measurements
13) CISPR 16-4-3, Specification for radio disturbance and immunity measuring apparatus and methods – Part 4-3: Uncertainties, statistics and limit modelling – Statistics considerations in the determination of EMC compliance of mass-produced products
14) CISPR 16-4-4, Specification for radio disturbance and immunity measuring apparatus and methods – Part 4-4: Uncertainties, statistics and limit modelling – Statistics of compliants and a model for the calculation of limits
YÊU CẦU KỸ THUẬT ĐỐI VỚI THIẾT BỊ ĐO VÀ PHƯƠNG PHÁP ĐO NHIỄU VÀ MIỄN NHIỄM TẦN SỐ RAĐIÔ – PHẦN 1-5: THIẾT BỊ ĐO NHIỄU VÀ MIỄN NHIỄM TẦN SỐ RAĐIÔ – VỊ TRÍ THỬ NGHIỆM HIỆU CHUẨN ANTEN TRONG DẢI TẦN TỪ 30 MHZ ĐẾN 1 000 MHZ
Specification for radio disturbance and immunity measuring apparatus and methods – Part 1-5: Radio disturbance and immunity measuring apparatus – Antenna calibration test sites for 30 MHz to 1 000 MHz
1. Phạm vi áp dụng
Tiêu chuẩn này là tiêu chuẩn cơ bản, qui định các yêu cầu đối với vị trí thử nghiệm hiệu chuẩn được sử dụng để thực hiện hiệu chuẩn anten cũng như các đặc tính của anten thử nghiệm, qui trình kiểm tra vị trí hiệu chuẩn và tiêu chí phù hợp của vị trí. Các thông tin khác về yêu cầu đối với vị trí hiệu chuẩn, xem xét anten thử nghiệm và lý thuyết về anten và độ suy giảm vị trí được cho trong các phụ lục tham khảo.
Yêu cầu kỹ thuật đối với thiết bị đo được cho trong TCVN 6989-1-1 (CISPR 16-1-1) và CISPR 16-1-4. Thông tin và cơ sở khác về độ không đảm bảo đo nói chung được nêu trong CISPR 16-4-1, tiêu chuẩn này có thể hữu ích trong việc ước tính độ không đảm bảo trong quá trình hiệu chuẩn của anten.
2. Tài liệu viện dẫn
Các tài liệu viện dẫn dưới đây là cần thiết cho việc áp dụng tiêu chuẩn này. Đối với các tài liệu có ghi năm công bố, chỉ áp dụng các bản được nêu. Đối với các tài liệu không ghi năm công bố, áp dụng bản mới nhất (kể cả các sửa đổi).
TCVN 6989-1-1: 2008 (CISPR 16-1-1: 2003), Yêu cầu kỹ thuật đối với thiết bị đo và phương pháp đo nhiễu và miễn nhiễm tần số rađiô – Phần 1-1: Thiết bị đo nhiễu và miễn nhiễm tần số rađiô – Thiết bị đo
TCVN 7492-1: 2005 (CISPR 14-1: 2002), Tương thích điện từ – Yêu cầu đối với thiết bị điện gia dụng, dụng cụ điện và các thiết bị tương tự – Phần 1: Phát xạ
CISPR 16-1-4: 2003, Specification for radio disturbance and immunity measuring apparatus and methods – Part 1-4: Radio disturbance and immunity measuring apparatus – Ancillary equipment – Radiated disturbances (Yêu cầu kỹ thuật đối với thiết bị đo và phương pháp đo nhiễu và miễn nhiễm tần số rađiô – Phần 1-4: Thiết bị đo nhiễu và miễn nhiễm tần số rađiô – Thiết bị phụ trợ – Nhiễu bức xạ)
CISPR 16-4-1: 2003, Specification for radio disturbance and immunity measuring apparatus and methods – Part 4-1: Uncertainties, statistics and limit modelling – Uncertainties in standardized EMC tests (Yêu cầu kỹ thuật đối với thiết bị đo và phương pháp đo nhiễu và miễn nhiễm tần số rađiô – Phần 4-1: Độ không đảm bảo đo, mô hình thống kê và giới hạn – Độ không đảm bảo đo trong thử nghiệm EMC tiêu chuẩn hóa)
CISPR 16-4-2: 2003, Specification for radio disturbance and immunity measuring apparatus and methods – Part 4-2: Uncertainties, statistics and limit modelling – Measurement instrumentation uncertainties (Yêu cầu kỹ thuật đối với thiết bị đo và phương pháp đo nhiễu và miễn nhiễm tần số rađiô – Phần 4-2: Độ không đảm bảo đo, thống kê và mô hình giới hạn – Độ không đảm bảo của dụng cụ đo)
IEC 60050 (161): 1990 International Electrotechnical Vocabulary (IEV) - Chapter 161: Electromagnetic compatibility (Từ vựng kỹ thuật điện quốc tế (IEV) - Chương 161: Tương thích điện từ) International Vocabulary of Basic and General Terms in Metrology, International Organization for Standardization, Geneva, 2nd edition , 1993 (Từ vựng quốc tế về các thuật ngữ chung và cơ bản trong đo lường, Tổ chức Tiêu chuẩn hóa Quốc tế, Giơ –ne-vơ, xuất bản lần thứ hai, 1993)
3 Thuật ngữ và định nghĩa
Tiêu chuẩn này áp dụng các thuật ngữ dưới đây. Ngoài ra, xem thêm IEC 60050(161).
3.1
Vị trí thử nghiệm hiệu chuẩn (CALTS) (calibration test site (CALTS))
Vị trí thử nghiệm thoáng có mặt phẳng đất là kim loại và có qui định chặt chẽ về đặc tính suy giảm vị trí theo phân cực điện trường ngang và thẳng đứng.
CALTS được dùng để xác định hệ số của anten trong không gian tự do.
Phép đo độ suy giảm vị trí của CALTS được dùng để so sánh với các phép đo độ suy giảm vị trí tương ứng của vị trí thử nghiệm sự phù hợp, để đánh giá tính năng của vị trí thử nghiệm sự phù hợp.
3.2
Vị trí thử nghiệm sự phù hợp (COMTS) (compliance test site (COMTS))
Môi trường đảm bảo các kết quả đo có hiệu lực, có khả năng lặp lại của cường độ trường nhiễu gây ra do thiết bị cần thử nghiệm để so sánh với giới hạn sự phù hợp.
3.3
Anten (antenna)
Một phần của hệ thống phát hoặc thu được thiết kế để phát hoặc thu sóng điện từ theo cách qui định. Chú thích 1: Trong nội dung của tiêu chuẩn này, bộ biến đổi cân bằng-không cân bằng là một phần của anten. Chú thích 2: Xem thêm thuật ngữ “anten dây”.
3.4
Bộ biến đổi cân bằng-không cân bằng (balun)
Mạng điện thụ động để chuyển đổi đường truyền hoặc thiết bị truyền từ cân bằng sang không cân bằng hoặc ngược lại.
3.5
Lưỡng cực cộng hưởng trong không gian tự do (free-space-resonant dipole)
Anten dây gồm hai dây dẫn cộng tuyến có độ dài bằng nhau, đặt đối đầu nhau, cách nhau một khe hở nhỏ, mỗi dây dài khoảng một phần tư chiều dài bước sóng sao cho ở tần số qui định, trở kháng vào của anten dây đo được qua khe hở là thuần trở khi lưỡng cực được đặt trong không gian tự do.
Chú thích 1: Trong tiêu chuẩn này, anten dây nối với bộ biến đổi cân bằng-không cân bằng còn được gọi là “anten thử nghiệm”.
Chú thích 2: Anten dây này còn được đề cập như “lưỡng cực điều hưởng”.
3.6
Độ suy giảm vị trí (site attenuation)
Độ suy giảm vị trí giữa hai vị trí qui định ở khu vực thử nghiệm là tổn hao do có thiết bị cần thử nghiệm được xác định bằng phép đo hai cổng, khi liên kết trực tiếp về điện giữa đầu ra máy phát và đầu vào máy thu được thay bằng anten phát và anten thu đặt ở các vị trí qui định.
3.7
Anten thử nghiệm (test antenna)
Sự kết hợp giữa lưỡng cực cộng hưởng trong không gian tự do với bộ biến đổi cân bằng-không cân bằng qui định.
Chú thích: Chỉ đối với mục đích của tiêu chuẩn này.
3.8
Anten dây (wire antenna)
Kết cấu qui định gồm một hoặc nhiều dây hoặc thanh kim loại để phát hoặc thu sóng điện từ.
Chú thích: Anten dây không bao gồm bộ biến đổi cân bằng-không cân bằng.
4 .Yêu cầu kỹ thuật và qui trình đánh giá hiệu lực đối với vị trí thử nghiệm cần sử dụng để hiệu chuẩn anten trong dải tần từ 30 MHz đến 1 000 MHz
Các yêu cầu đối với vị trí thử nghiệm dùng cho phép đo cường độ trường nhiễu tần số rađiô trong dải tần từ 30 MHz đến 1 000 MHz được qui định trong điều 5 của CISPR 16-1-4. Vị trí thử nghiệm này có thể không thích hợp để hiệu chuẩn anten. Điều này qui định các yêu cầu và qui trình đánh giá hiệu lực đối với vị trí thử nghiệm thích hợp để hiệu chuẩn anten đặt phía trên một mặt phẳng kim loại dẫn điện và bằng phẳng trong dải tần từ 30 MHz đến 1 000 MHz. Vị trí thử nghiệm thỏa mãn các yêu cầu chặt chẽ này cũng có thể được dùng làm vị trí thử nghiệm chuẩn để so sánh với 5.6 của CISPR 16-1-4 trong qui trình đánh giá hiệu lực thay thế.
4.1. Lời giới thiệu
Vị trí thử nghiệm thích hợp để thực hiện hiệu chuẩn anten, đề cập ở đây là CALTS, nhằm cung cấp môi trường thích hợp để hiệu chuẩn anten với hệ số anten không gian tự do của nó. Việc hiệu chuẩn này được thực hiện thuận lợi nhất là bên trên một mặt phẳng phản xạ bằng cách chỉ sử dụng phân cực ngang. Các điều từ 4.3 đến 4.6 qui định các đặc tính của CALTS, các đặc tính của anten thử nghiệm tính được và qui trình kiểm tra (đánh giá hiệu lực) CALTS và các tiêu chí về tính năng. Qui trình đánh giá hiệu lực của CALTS được cho trong 4.5 đòi hỏi sử dụng anten lưỡng cực tính được như qui định trong 4.4, từ đó tạo ra khả năng so sánh độ suy giảm vị trí dự đoán lý thuyết với tính năng của CALTS đo được. Các hạng mục cần ghi lại trong báo cáo đánh giá hiệu lực CALTS được tóm tắt trong 4.7. Phụ lục A cung cấp hướng dẫn tạo kết cấu CALTS, tuân thủ các tiêu chí đánh giá hiệu lực qui định trong 4.6.
Để sử dụng CALTS làm vị trí thử nghiệm chuẩn (REFSITE) nhằm đánh giá hiệu lực tính năng của vị trí thử nghiệm theo điều 5 của CISPR 16-1-4, cần phải qui định một số yêu cầu bổ sung. Điều 4.7 qui định các đặc tính và tiêu chí tính năng bổ sung. Vị trí thử nghiệm qui định trong điều 5 của CISPR 16-1-4 được dùng để biểu thị sự phù hợp với các giới hạn phát xạ bức xạ được đề cập ở đây là vị trí thử nghiệm sự phù hợp (COMTS). Hiệu lực của COMTS có thể đạt được bằng cách so sánh với độ suy giảm vị trí lý thuyết nêu ở điều 5 của CISPR 16-1-4 (được ưu tiên) hoặc bằng cách so sánh phép đo độ suy giảm vị trí của REFSITE với phép đo độ suy giảm vị trí của COMTS tương ứng, sử dụng cùng bố trí và thiết bị đo (anten, cáp, máy phát tín hiệu, máy thu, v.v…).
Các phụ lục của tiêu chuẩn này có các yêu cầu kỹ thuật tham khảo của CALTS và lưỡng cực cộng hưởng không gian tự do tính được (lưỡng cực điều hưởng) được dùng trong qui trình đánh giá hiệu lực của CALTS. Các phụ lục cũng đưa ra cách tính độ suy giảm vị trí lý thuyết, các ví dụ bằng số và danh mục kiểm tra đối với qui trình đánh giá hiệu lực.
4.2 Yêu cầu kỹ thuật đối với vị trí thử nghiệm hiệu chuẩn anten (CALTS)
4.2.1 Lời giới thiệu
CALTS bao gồm các thành phần chính sau đây:
- mặt phẳng kim loại bằng phẳng dẫn điện tốt (mặt phẳng phản xạ);
- khu vực không có vật cản về điện từ xung quanh mặt phẳng phản xạ. Ngoài ra, cần có các thiết bị phụ trợ sau đây:
- hai cột anten để đỡ các anten trong qui trình đánh giá hiệu lực CALTS hoặc hiệu chuẩn anten;
- cáp để nối đến các anten này; và
- thiết bị điện tử, như máy phát tín hiệu RF và máy thu đo.
Yêu cầu kỹ thuật qui định đối với CALTS được nêu trong 4.2.2, còn Phụ lục A nêu một số yêu cầu kỹ thuật tham khảo để hướng dẫn tạo kết cấu và bố trí CALTS sao cho thỏa mãn được các tiêu chí về đánh giá hiệu lực.
4.2.2 Yêu cầu kỹ thuật qui định
Để hiệu chuẩn anten, CALTS phải tuân thủ các tiêu chí về đánh giá hiệu lực nêu trong 4.5.3, nghĩa là
a) độ suy giảm vị trí ở các độ cao cố định của anten, và
b) độ cao anten để có độ suy giảm vị trí lớn nhất, hoặc có độ suy giảm vị trí lớn nhất, ở mọi tần số mà anten phải được hiệu chuẩn.
Chú thích 1: Trong qui trình đánh giá hiệu lực của CALTS, thiết bị được dùng cũng là đối tượng của yêu cầu kỹ thuật bắt buộc (xem 4.3 và 4.4).
Chú thích 2: Báo cáo hiệu lực của CALTS (4.6) bao gồm thông tin về duy trì sự phù hợp với các yêu cầu, để chứng tỏ CALTS phù hợp với các yêu cầu trong suốt quá trình sử dụng thực tế của nó.
4.3 Yêu cầu kỹ thuật về anten thử nghiệm
4.3.1 Lời giới thiệu
Để tính toán được (bằng số) độ suy giảm vị trí lý thuyết SAc cần thiết trong qui trình đánh giá hiệu lực, anten cần sử dụng có thể được lập mô hình một cách chính xác. Do đó, anten thử nghiệm phải là một lưỡng cực cộng hưởng trong không gian tự do nối đến một bộ biến đổi cân bằng-không cân bằng có các đặc tính qui định. Các yêu cầu kỹ thuật qui định về anten thử nghiệm được nêu ở 4.3.2. Ví dụ về kết cấu của anten thử nghiệm được cho trong Phụ lục B.
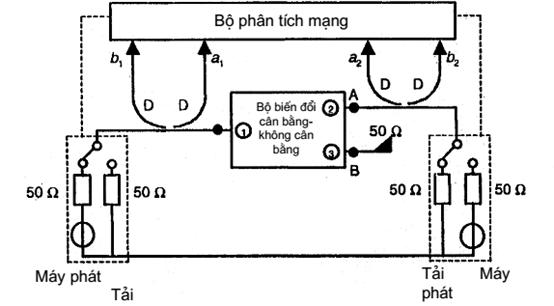
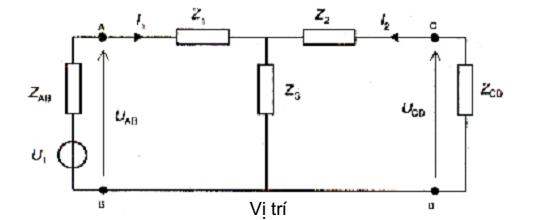
Anten thử nghiệm bao gồm một bộ biến đổi cân bằng-không cân bằng và hai phần tử dây dẫn cộng tuyến có đường kính mỗi dây Dwe và chiều dài Lwe. Các phần tử này được nối đến hai đầu nuôi (A và B trong Hình 1) của bộ biến đổi cân bằng-không cân bằng. Khe hở giữa các đầu nuôi này có độ rộng Wg. Chiều dài đỉnh- đỉnh La của anten được cho bởi La = 2Lwe + Wg. Tâm của anten thử nghiệm nằm chính giữa khe hở của đầu nuôi trên đường tâm của hai phần tử dây dẫn cộng tuyến.
Bộ biến đổi cân bằng-không cân bằng có cổng vào/ra (anten phát/thu) không cân bằng và một cổng cân bằng ở hai đầu nuôi A và B. Ví dụ, ở Hình 1, mục đích của bộ biến đổi cân bằng-không cân bằng được thể hiện bằng sơ đồ bởi máy biến đổi cân bằng-không cân bằng.
4.3.2 Yêu cầu kỹ thuật qui định
4.3.2.1 Anten thử nghiệm phải có các phần tử dây dẫn đồng nhất có chiều dài Lwe có thể ngắt được khỏi bộ biến đổi cân bằng-không cân bằng để cho phép các tham số cân bằng là có hiệu lực, và cho phép nối các đầu của bộ biến đổi cân bằng-không cân bằng của hai anten dùng trong phép đo độ suy giảm vị trí.
4.3.2.2 Chiều dài đỉnh-đỉnh La(f,Dwe) của anten dây xấp xỉ l/2 được xác định với điều kiện là, ở tần số qui định f và trong không gian tự do, giá trị tuyệt đối của phần phức của trở kháng vào ở các đầu nuôi nhỏ hơn 1 W.
Chú thích 1: Nếu phần tử dây dẫn có đường kính không đổi và nếu Dwe <>a, thì khi đó La(f,Dwe) có thể được tính từ công thức (C.2) ở C.1.1. Nếu đường kính thay đổi, ví dụ khi sử dụng anten kiểu ống lồng, thì La(f) chỉ có thể được tính bằng số, xem C.2.2.
Chú thích 2: Khi sử dụng anten kiểu ống lồng, thành phần ống lồng phải được điều hưởng sao cho các phần tử có đường kính lớn nhất được dùng trước (xem Hình 2), và các tính toán bằng số cần tính theo phương pháp này.
CHÚ THÍCH: Tâm của anten thử nghiệm nằm ở giữa khe hở trên đường tâm của hai phần tử dây.
Hình 1 - Sơ đồ của anten thử nghiệm

Hình 2 - Điều chỉnh phần tử dây kiểu ống lồng đến chiều dài Lwe
Đang xem xét: Tại tần số thử nghiệm từ 30 MHz đến 80 MHz, có thể sử dụng lưỡng cực chiều dài cố định có La = La (80 MHz).
4.3.2.3 Khe hở đầu nuôi phải là Wg £ 15 mm hoặc Wg £ 0,03 lmin, chọn giá trị nào nhỏ hơn, trong đó
lmin = c0/fmax,
fmax là tần số thử nghiệm cao nhất tại đó anten thử nghiệm được dùng; và
c0 là vận tốc của sóng điện từ trong chân không
4.3.2.4 Nếu chiều dài đỉnh- đỉnh La(f) của anten dây thực tế có dung sai nằm trong khoảng DLa của chiều dài La(f) qui định cho anten đó (xem Bảng 2), và nếu chiều rộng của khe hở đầu nuôi tuân thủ 4.3.2.3, thì chiều dài này được coi là thích hợp.
4.3.2.5 Cổng cân bằng của bộ biến đổi cân bằng-không cân bằng phải có:
a) trở kháng qui định ZAB và VSWR lớn nhất qui định, xem Bảng 2, khi cổng không cân bằng được nối vào trở kháng Ze có từ mạch ngoài (cáp nuôi của anten);
b) mức cân bằng về biên độ tốt hơn DAb dB so với điểm chuẩn của bộ biến đổi cân bằng-không cân bằng, xem Bảng 2, khi cả hai đầu nuôi được nối vào trở kháng là ZAB/2 so với điểm chuẩn của bộ biến đổi cân bằng-không cân bằng;
c) cân bằng về pha là 180o ± DFbo (xem Bảng 2), khi cả hai đầu nuôi được nối vào trở kháng là ZAB/2 so với điểm chuẩn của bộ biến đổi cân bằng-không cân bằng.
Chú thích 1: Các bộ nối ở cổng bộ biến đổi cân bằng-không cân bằng phải cho phép thực hiện được các phép đo RF tại ba cổng của bộ biến đổi cân bằng-không cân bằng.
Chú thích 2: Trở kháng ZAB của cổng cân bằng là trở kháng giữa các đầu nuôi A và B trong Hình 1. Giá trị ưu tiên của trở kháng này là ZAB = 100 W (hiệu dụng).
Chú thích 3: Trở kháng Ze có từ mạch ngoài thường là 50 W, là giá trị ưu tiên.
Chú thích 4: Các yêu cầu về cân bằng biên độ và cân bằng pha đảm bảo rằng tín hiệu ở các đầu nuôi A và B bằng nhau về biên độ và ngược pha so với điểm chuẩn của bộ biến đổi cân bằng-không cân bằng. Khi cổng cân bằng thỏa mãn các yêu cầu này, sự cách ly giữa hai đầu nuôi sẽ lớn hơn 26 dB khi cổng không cân bằng được nối vào trở kháng Ze.
Chú thích 5: Trong chừng mực có thể, các phần tử của bộ biến đổi cân bằng-không cân bằng cần được định hướng để có được bề mặt phản xạ phân cực chung nhỏ nhất đến anten dây.
Chú thích 6: Các phần tử của bộ biến đổi cân bằng-không cân bằng cần được bọc về điện sao cho các đặc tính (ký sinh) của chúng không bị ảnh hưởng bởi môi trường xung quanh. Điểm chuẩn của bộ biến đổi cân bằng- không cân bằng và đầu nối đất của cổng vào/ra được nối đến vỏ bọc này.
4.3.2.6 Các đặc tính của bộ biến đổi cân bằng-không cân bằng nêu trong 4.3.2.5 có thể được xác định từ phép đo tham số S và, một phần, từ phép đo theo phương pháp truyền.
Chú thích 1: Việc đấu nối đầu-đầu của bộ biến đổi cân bằng-không cân bằng trong 4.4.4.2 và 4.4.4.4 có thể thay bằng đấu nối cáp-cáp khi biết trước tập hợp toàn bộ tham số S của bộ biến đổi cân bằng-không cân bằng và trở kháng cổng được đưa vào bộ biến đổi cân bằng-không cân bằng bằng máy phát tín hiệu và máy thu, với điều kiện là các đặc tính của bộ biến đổi cân bằng-không cân bằng được đưa vào khi tính toán SAc.
Chú thích 2: Tham số S và các phép đo theo phương pháp truyền được mô tả trong Phụ lục B.
4.3.2.7 Trong qui trình đánh giá hiệu lực của CALTS, nếu anten thử nghiệm và/hoặc thiết bị thử nghiệm được dùng có ZAB và/hoặc Ze chênh lệch so với giá trị ưu tiên 100 W và 50 W tương ứng thì khi đó cần được đề cập rõ trong báo cáo hiệu lực (4.6).
4.4 Qui trình đánh giá hiệu lực vị trí thử nghiệm hiệu chuẩn anten
4.4.1 Lời giới thiệu
Trong qui trình đánh giá hiệu lực, cần so sánh độ suy giảm vị trí đo được SAm với độ suy giảm vị trí tính được theo lý thuyết SAc. Do đó, qui trình này sẽ kiểm tra xem CALTS có thỏa mãn đầy đủ các đặc tính giả thiết trong tính toán SA hay không, nghĩa là:
a) mặt phẳng hoàn toàn bằng phẳng và rất rộng;
b) giá trị tuyệt đối của hệ số phản xạ của mặt phẳng là r = 1; và
c) lệch pha của sóng tới và sóng phản xạ EM phân cực ngang trên mặt phẳng F = p rađian;
d) ảnh hưởng của thiết bị phụ trợ và môi trường xung quanh mặt phẳng là không đáng kể.
Để kiểm tra các đặc tính trên, cần thực hiện hai phép đo:
1) các đặc tính a), b) và d) được kiểm tra đồng thời theo qui trình đo SA ở các độ cao cố định của anten (xem 4.4.4), sau đó so sánh SA đo được với SA tính được;
2) các đặc tính a), c) và d) được kiểm tra đồng thời theo qui trình mà độ cao của một trong số anten thử nghiệm quét để có SA lớn nhất, sau đó so sánh độ cao của anten đo được và độ cao tính được ứng với giá trị lớn nhất (xem 4.4.5).
Một cách khác, điểm 2) cũng có thể kiểm tra đồng thời theo qui trình đo quét tần số (xem 4.4.6).
Dưới đây, lượng ±DX đại diện cho dung sai lớn nhất cho phép của giá trị tham số X trong đánh giá hiệu lực. Các dữ liệu mang tính định lượng về dung sai được tóm tắt trong Bảng 2.
4.4.2 Bố trí thử nghiệm
4.4.2.1 Tâm của anten thử nghiệm, cột anten và cáp anten đồng trục được đặt trên mặt phẳng vuông góc với mặt phẳng phản xạ và ở giữa mặt phẳng phản xạ.
Chú thích: Tâm của anten thử nghiệm được xác định trong 4.3.1.
4.4.2.2 Các phần tử dây dẫn cộng tuyến được đặt song song với mặt phẳng phản xạ (anten theo phân cực ngang) và vuông góc với mặt phẳng (thẳng đứng) đề cập trong 4.4.2.1.
Chú thích: ở phía thấp hơn của dải tần số, ví dụ từ 30 MHz đến 40 MHz, phần tử dây tương đối dài có thể bị võng xuống, do đó ảnh hưởng đến kết quả đo. ảnh hưởng này có thể được loại trừ bằng cách làm cột đỡ cho dây, hoặc có thể tính đến khi tính toán độ suy giảm vị trí lý thuyết (xem thêm 4.4.4.3 và 4.5.3.1).
4.4.2.3 Khoảng cách theo chiều ngang giữa các tâm của anten thử nghiệm là
d = 10,00 m ±D d m (xem Bảng 2).
4.4.2.4 Độ cao của tâm anten phát phía trên mặt phẳng phản xạ là
ht = 2,00 m ±Dht m (xem Bảng 2).
4.4.2.5 Độ cao của tâm anten thu phía trên mặt phẳng phản xạ phải được điều chỉnh đến độ cao hr ±Dhr, như qui định trong Bảng 1 và Bảng 2, và phải quét được toàn bộ dải độ cao 1,0 m £ hr £ 4,0 m như yêu cầu trong 4.4.5.
4.4.2.6 Cáp đồng trục nối đến bộ biến đổi cân bằng-không cân bằng của anten phát và anten thu bố trí vuông góc với phần tử dây dẫn và song song với mặt phẳng phản xạ trên toàn bộ khoảng cách ít nhất là 1 m tính từ phần tử dây dẫn. Sau đó, cáp có thể rơi trên mặt phẳng phản xạ và (tốt nhất là) tiếp tục bố trí bên dưới mặt phẳng phản xạ hoặc bên trên mặt phẳng này vuông góc với các phần tử dây cho đến khi tới mép mặt phẳng. Để tránh ghép nối phương thức chung, nên nối tải ferit của cáp đồng trục đến bộ biến đổi cân bằng-không cân bằng.
Chú thích 1: Cáp cần có trở kháng truyền thấp để tránh ảnh hưởng đến kết quả đã đo của dòng điện vỏ cáp cảm ứng qua trở kháng này.
Chú thích 2: Khi cáp được bố trí một phần bên dưới mặt phẳng phản xạ, vỏ bọc cáp cần liên kết với (vòng 360o) mặt phẳng phản xạ khi xuyên qua mặt phẳng này.
4.4.2.7 Máy phát RF và máy thu RF không được nâng lên cao hơn mức mặt phẳng phản xạ nếu máy phát tín hiệu và máy thu nằm trong khoảng 20 m tính từ mặt phẳng này.
4.4.2.8 Máy phát RF phải có độ ổn định tần số và độ ổn định mức đầu ra tốt trong suốt quá trình đo độ suy giảm vị trí. Xem thêm 4.4.4.5.
Chú thích: Trong qui trình đo có thể cần tính đến cả thời gian khởi động (thường được chỉ ra bởi nhà chế tạo thiết bị) của máy phát RF và của máy thu RF, để đảm bảo đủ độ ổn định của các thiết bị này.
4.4.2.9 Máy thu RF phải có độ tuyến tính được hiệu chuẩn trên toàn bộ dải làm việc ít nhất là 50 dB.
Độ không đảm bảo đo về độ tuyến tính của máy thu được biểu thị bằng DAr (xem 4.5.2.2). Giá trị phù hợp đối với độ không đảm bảo đo về độ tuyến tính của máy thu là 0,2 dB.
Chú thích: Nếu dải làm việc tuyến tính nhỏ hơn 50 dB thì có thể thực hiện tiếp một phương pháp thay thế, dùng bộ suy giảm chính xác đã hiệu chuẩn như mô tả trong 4.4.4.7.
4.4.3 Tần số thử nghiệm và độ cao anten thu
4.4.3.1 Với mục đích tuân thủ 4.2.2, phép đo đánh giá hiệu lực mô tả ở 4.4.4 ít nhất phải được tiến hành ở các tần số và các độ cao cố định hr (m) liên đới của tâm anten thu phía trên mặt phẳng phản xạ cho trong Bảng 1.
Chú thích 1: Thông tin liên quan đến tính năng của CALTS ở tần số trung gian có thể có được bằng cách sử dụng phép đo quét tần số như mô tả trong A.2.2.
Chú thích 2: Cần chú ý trong trường hợp đáp tuyến Q cao, đặc biệt đối với các tần số trên 300 MHz. Trong trường hợp như vậy, cần tiến hành qui trình quét tần số xung quanh các tần số qui định và ở các độ cao liên đới.
4.4.3.2 Ngoài các phép đo đánh giá hiệu lực mô tả trong 4.4.4, phải tiến hành ba phép đo quét độ cao của anten thu như mô tả trong 4.4.5 hoặc ba phép đo quét tần số như mô tả trong 4.4.6.
a) Khi chọn để thực hiện phép đo quét độ cao của anten thu, các phép đo này phải được tiến hành ở tần số fs: 300 MHz, 600 MHz và 900 MHz, với anten thử nghiệm được điều hưởng đến tần số liên đới fs.
b) Khi chọn để thực hiện các phép đo quét tần số, các phép đo này phải được tiến hành với các tổ hợp {hrs,fs}: {2,65 m, 300 MHz}, {1,30 m, 600 MHz} và {1,70 m, 900 MHz} giữa độ cao anten thu hrs và tần số điều hưởng anten thử nghiệm fs.
Bảng 1 - Dữ liệu về tần số và độ cao anten thu cố định đối với phép đo SA, trong đó ht = 2 m và d = 10 m (4.4.2.3 và 4.4.2.4)
|
Tần số MHz |
hr m |
Tần số MHz |
hr m |
Tần số MHz |
hr m |
|
30 |
4,00 |
90 |
4,00 |
300 |
1,50 |
|
35 |
4,00 |
100 |
4,00 |
400 |
1,20 |
|
40 |
4,00 |
120 |
4,00 |
500 |
2,30 |
|
45 |
4,00 |
140 |
2,00 |
600 |
2,00 |
|
50 |
4,00 |
160 |
2,00 |
700 |
1,70 |
|
60 |
4,00 |
180 |
2,00 |
800 |
1,50 |
|
70 |
4,00 |
200 |
2,00 |
900 |
1,30 |
|
80 |
4,00 |
250 |
1,50 |
1 000 |
1,20 |
4.4.3.3 Nếu có tạp băng tần hẹp, như tạp do các máy phát thanh quảng bá gây ra, cản trở độ chính xác của phép đo ở tần số qui định trong 4.4.3.1 và 4.4.3.2, thì phải chọn các tần số thử nghiệm càng gần với tần số qui định đó càng tốt.
Nguyên nhân gây sai lệch so với tần số qui định phải được ghi trong báo cáo đánh giá hiệu lực (xem 4.6).
4.4.3.4 Tần số của máy phát tín hiệu RF cung cấp tín hiệu cho anten phát phải được điều chỉnh trong khoảng Df (xem Bảng 2), của tần số thử nghiệm qui định trong Bảng 1 hoặc trong 4.4.3.2.
4.4.4 Phép đo độ suy giảm vị trí
Điều này mô tả ba phép đo cần thiết để xác định độ suy giảm vị trí đo được SAm (xem 4.5.3.1), ở tần số qui định. Độ suy giảm vị trí được xem là SA giữa các đầu nuôi của anten phát (A và B trong Hình 3 và Hình 4) và các đầu nuôi của anten thu (C và D trong Hình 3 và 4).
Chú thích: Nếu có sẵn toàn bộ tham số S của bộ biến đổi cân bằng-không cân bằng (xem 4.3.2.6), thì cũng có thể xem là SA giữa hai giao diện cáp-bộ biến đổi cân bằng-không cân bằng với điều kiện là các đặc tính của bộ biến đổi cân bằng-không cân bằng được tính đến khi tính toán SA lý thuyết. Trong mô tả dưới đây, khả năng này sẽ được chỉ ra bằng chú thích, khi thích hợp.
Hình 3 - Xác định Ur1(f) hoặc Ur2(f)

Hình 4 - Xác định Us(f) với các anten dây ở vị trí qui định
4.4.4.1 Phép đo 1: Tại tần số qui định f, điện áp chuẩn Ur1(f) được xác định. Từ điện áp này có thể tính toán được độ suy giảm của tín hiệu giữa cổng đầu ra của máy phát RF và các đầu nuôi của anten dây phát và, tương tự, giữa các đầu nuôi của anten dây thu và cổng đầu vào của máy thu.
Ur1(f) được xác định như dưới đây (xem Hình 3). Phần tử dây dẫn của anten thử nghiệm được ngắt khỏi bộ biến đổi cân bằng-không cân bằng của chúng và hai bộ biến đổi cân bằng-không cân bằng được nối đầu-đầu (xem thêm chú thích 4 dưới đây) với mối nối càng ngắn càng tốt, tốt nhất là <>lmin/10, trong đó lmin đã được xác định trong 4.3.2.3.
Mức của máy phát RF được đặt để cho số đọc của máy thu cao hơn mức tạp của máy thu ít nhất là 60 dB (xem chú thích 2 dưới đây). Số đọc của máy thu được ghi lại là Ur1(f).
Chú thích 1: Mức của trường phát xạ không được vượt quá mức truyền cục bộ cho phép.
Chú thích 2: Trong điều này, máy thu RF được coi như tuân thủ 4.4.2.9. Nếu áp dụng chú thích của 4.4.2.9 thì cần áp dụng phương pháp nêu trong 4.4.4.7.
Chú thích 3: Mức tạp của máy thu có thể giảm bằng cách giảm độ rộng băng tần máy thu. Tuy nhiên, nếu máy phát RF và máy thu RF không đồng bộ về tần số, như trong trường hợp máy phát tín hiệu tự hiệu chỉnh và bộ phân tích phổ, thì độ rộng băng tần máy thu phải đủ rộng sao cho độ trôi tần số của máy phát RF không làm ảnh hưởng đến kết quả đo.
Chú thích 4: Nếu cho phép áp dụng phương pháp nêu trong chú thích của 4.4.4, thì anten thử nghiệm hoàn chỉnh được ngắt ra và hai cáp anten được nối với nhau khi xác định Ur1(f) và Ur2(f) theo 4.4.4.4.
4.4.4.2 Biên độ đặt của máy phát tín hiệu RF sử dụng trong 4.4.4.1 ở tần số cụ thể được giữ không đổi trong suốt các phép đo phối hợp với 4.4.4.3 và 4.4.4.4.
4.4.4.3 Phép đo 2: Các bộ biến đổi cân bằng-không cân bằng được ngắt khỏi nhau, các phần tử dây dẫn được nối với bộ biến đổi cân bằng-không cân bằng của chúng (xem Hình 4), và được điều chỉnh đến chiều dài La(f) qui định. Anten thử nghiệm được đưa vào vị trí như qui định trong 4.4.2 và 4.4.3. Các thành phần khác bố trí trong cơ cấu thử nghiệm tương tự như nêu ở 4.4.4.1. Xem thêm chú thích của 4.4.2.2 và 4.4.4.5.
Tại tần số thử nghiệm qui định f, và với các anten ở vị trí qui định, số đọc của máy thu được ghi lại là Us(f).
4.4.4.4 Phép đo 3: Phép đo điện áp chuẩn (xem 4.4.4.1) được lặp lại ở cùng tần số qui định. Giá trị đo được ghi lại là Ur2(f).
4.4.4.5 Nếu giá trị Ur1(f) và Ur2(f), tính bằng đơn vị logarit, chênh lệch nhiều hơn 0,2 dB, thì độ ổn định của bố trí thử nghiệm phải được cải thiện và lặp lại các phép đo 1, 2 và 3 đã nêu ở trên.
Chú thích: Nguyên nhân gây mất ổn định có thể là do sự phụ thuộc vào nhiệt độ của độ suy giảm cáp đồng trục, đặc biệt là trực tiếp dưới ánh nắng mặt trời.
4.4.4.6 Độ suy giảm vị trí đo được SAm(f) được cho bằng công thức sau:
SAm(f)
= 20log10  (dB) (1)
(dB) (1)
Trong đó Ura(f) là giá trị trung bình của Ur1(f) và Ur2(f).
Chú thích: Nếu không thực hiện biện pháp dự phòng nào để ngăn ngừa việc võng phần tử dây của cả hai anten thử nghiệm ở các tần số thấp 30 MHz, 35 MHz và 40 MHz thì có thể cần phải hiệu chỉnh độ suy giảm vị trí đo được SAm (xem 4.5.3.1).
4.4.4.7 Nếu dải làm việc của máy thu RF không tuân thủ 4.4.2.9 thì có thể sử dụng phương pháp thay thế sau đây với điều kiện có sẵn toàn bộ tham số S của bộ biến đổi cân bằng-không cân bằng và các đặc tính của bộ biến đổi cân bằng-không cân bằng được tính đến khi tính toán SA lý thuyết.
a) Xác định và ghi lại số đọc của máy thu Us(f) như mô tả trong 4.4.4.3.
b) Thay các anten thử nghiệm bằng bộ suy giảm chính xác đã hiệu chuẩn và nối cả hai cáp anten với bộ suy giảm này. Điều chỉnh tổn hao do có bộ suy giảm về mức Ai1(f) sao cho thu được cùng số đọc Us(f) của máy thu như xác định ở điểm a). Ghi lại Ai1(f) và độ không đảm bảo đo liên quan DAi(f).
c) Để chứng minh độ ổn định của cơ cấu thử nghiệm đề cập ở 4.4.2.8, lặp lại bước b) để xác định Ai2(f) sau khoảng thời gian xấp xỉ bằng tổng thời gian giữa việc đọc Us(f) ở bước a) và Ai1(f) ở bước b). Nếu Ai2(f) chênh lệch so với Ai1(f) nhiều hơn 0,2 dB thì độ ổn định của cơ cấu thử nghiệm phải được cải thiện và lặp lại các bước a), b) và c).
d) Nếu bố trí thử nghiệm có đủ độ ổn định thì độ suy giảm vị trí đo được sẽ là:
SAm(f) = 20log10 {Aia} (dB) (2)
trong đó Aia(f) là giá trị trung bình của Ai1(f) và Ai2(f) theo đơn vị tuyến tính.
4.4.5 Phép đo quét độ cao anten
Điều này mô tả ba phép đo quét độ cao anten cần thiết để xác định độ cao anten thu hr,max mà tại đó độ suy giảm vị trí đo được thể hiện đỉnh cực đại (xem 4.4.3.2 a) và 4.5.3.2). Nguyên nhân là do khử (gần như tuyệt đối) sóng trực tiếp đến anten thu bằng sóng gián tiếp, nghĩa là sóng phản xạ từ mặt phẳng phản xạ.
4.4.5.1 Tại tần số fs, qui định ở 4.4.3.2 a) và trong bố trí thử nghiệm như mô tả trong 4.4.2, độ cao của anten thu thử nghiệm (điều hưởng đến tần số fs) được tăng từ độ cao hr = 1,0 m lên độ cao hr,max(fs) tương ứng với đỉnh cực đại đầu tiên trong SA, nghĩa là đỉnh cực tiểu đầu tiên trong số đọc của máy thu.
Chú thích: Giá trị cực tiểu trong số đọc của máy thu không cần quan tâm. Số đọc này chỉ là một chỉ số để tìm hr,max(fs).
4.4.5.2 Độ cao hr,max(fs) được đo và ghi lại cùng với độ không đảm bảo đo liên quan Dhr,max(fs).
Chú thích: Giá trị hr,max(fs) đo được có thể không bằng giá trị hrs(fs) như nêu trong 4.4.3.2 b) vì hr,max(fs) còn phụ thuộc vào các đặc tính của anten thử nghiệm thực tế.
4.4.6 Phép đo quét tần số
Điều này mô tả ba phép đo quét tần số cần thiết để xác định tần số fmax tại đó độ suy giảm vị trí đo được thể hiện đỉnh cực đại [xem 4.4.3.2 b) và 4.5.3.3]. Đỉnh cực đại này là do sự khử (gần tuyệt đối) sóng trực tiếp đến anten thu bởi sóng gián tiếp, nghĩa là sóng phản xạ từ mặt phẳng phản xạ.
4.4.6.1 Ở độ cao anten thu thử nghiệm cố định, hrs(fs) qui định ở 4.4.3.2 b) và trong cơ cấu thử nghiệm có anten thử nghiệm được điều hưởng đến tần số liên đới fs như nêu trong 4.4.3.2 b), tần số của máy phát tín hiệu RF được quét từ tần số thấp hơn nhiều so với fs, nghĩa là thấp hơn fs 100 MHz, lên đến giá trị fmax(hrs) tương ứng với điểm cao nhất của đỉnh cực đại trong SA, nghĩa là giá trị nhỏ nhất trong số đọc của máy thu.
Chú thích: Giá trị nhỏ nhất trong số đọc của máy thu không cần quan tâm. Số đọc này chỉ là một chỉ số để tìm fmax(hrs).
4.4.6.2 Tần số fmax(hrs) được ghi lại cùng với độ không đảm bảo đo liên quan, Dfmax(hrs).
Chú thích: Giá trị fmax(hrs) đo được không cần phải bằng giá trị fs(hrs) như nêu trong 4.4.3.2 a) vì fmax(hrs) còn phụ thuộc vào các đặc tính của anten thử nghiệm thực tế.
4.5 Các tiêu chí về sự phù hợp của vị trí thử nghiệm hiệu chuẩn anten
4.5.1 Lời giới thiệu
CALTS được coi là thỏa mãn khi, ở mọi tần số tại đó đòi hỏi CALTS để thực hiện các phép hiệu chuẩn anten, độ suy giảm vị trí đo được (4.4.3.1) và độ cao anten đo được hoặc tần số đo được (4.4.3.2) nằm trong phạm vi biên dự phòng nhất định của giá trị lý thuyết tính được (4.5.3). Ngoài độ không đảm bảo trong dữ liệu đo khác nhau, giá trị biên này còn tính đến dung sai cho phép trong bố trí thử nghiệm.
Như giải thích ở 4.5.2, biên dự phòng về độ không đảm bảo gồm có một phần phải được tính bằng cách dùng mô hình lý thuyết và một phần được gắn trực tiếp với độ không đảm bảo đo trong phép đo điện áp mà từ đó xác định độ suy giảm vị trí đo được, và gắn với độ không đảm bảo đo trong các phép đo quét độ cao hoặc quét tần số.
4.5.2 Dung sai và độ không đảm bảo đo
4.5.2.1 Dung sai lớn nhất đối với các tham số khác nhau được liệt kê trong Bảng 2.
Bảng 2 - Dung sai lớn nhất với d = 10 m
|
Biến số |
Dung sai lớn nhất |
Điều |
|
La |
±0,0025 La hoặc ±0,001 (m) nếu La < 0,400=""> |
4.3.2.4 |
|
ZAB |
VSWR ≤ 1,10 |
4.3.2.5 a) |
|
Ab |
±0,4 dB |
4.3.2.5 b) |
|
Fb |
±2o |
4.3.2.5 c) |
|
d |
±0,04 m |
4.4.2.3 |
|
ht |
±0,01 m |
4.4.2.4 |
|
hr |
±0,01 m |
4.4.2.5 |
|
f |
±0,001 f |
4.4.3.4 |
|
Chú thích: Sự cần thiết phải tính đến dung sai ∆Dwe theo bán kính của phần tử dây và độ không đảm bảo kết hợp với sự thẳng hàng của anten dây, đang được xem xét. |
||
4.5.2.2 Độ không đảm bảo đo DSAm theo độ suy giảm vị trí đo được SAm như xác định trong công thức (1) ở 4.4.4.6 được cho bởi:
![]()
trong đó DSAr được cho bởi DAr trong 4.4.2.9, hoặc bởi DAi(f) trong 4.4.4.7, chọn điều nào áp dụng được. DSAt giải thích cho độ nhạy của độ suy giảm vị trí các dung sai tham số (các giá trị lớn nhất được cho trong Bảng 2). Giá trị độ tin cậy 95 % của DSAr và DSAt phải được dùng trong công thức (3).
Chú thích: DSAt (95 %) có thể được tính bằng cách sử dụng mô hình cho ở Phụ lục C.
4.5.2.3 Nếu dung sai của các tham số phù hợp với các giá trị cho trong Bảng 2, thì DSAt (95 %) = 0,2 dB có thể được dùng cho toàn bộ dải tần từ 30 MHz đến 1 000 MHz. Trong trường hợp này, không cần thực hiện việc tính toán DSAt và cũng không cần ghi lại kết quả tính toán trong báo cáo đánh giá hiệu lực của CALTS.
Chú thích: Cơ sở cho DSAt (95 %) = 0,2 dB được nêu trong C.1.3.2.
4.5.2.4 Độ không đảm bảo đo Dhrm theo độ cao đo được của anten thu hr,max như xác định ở 4.4.5, được cho bởi:

trong đó Dhr,max được xác định theo 4.4.5.2, và Dhrt giải thích cho độ nhạy của hr,max với các dung sai về tham số (các giá trị lớn nhất được cho trong Bảng 2).
Chú thích: Dhrt có thể được tính bằng cách sử dụng mô hình cho trong C.1.3.3.
4.5.2.5 Nếu dung sai của các tham số phù hợp với các giá trị cho trong Bảng 2, thì Dhrt (95 %) = 0,025 m có thể được dùng ở ba tần số qui định. Trong trường hợp này, không cần phải tính Dhrt và cũng không cần ghi lại kết quả tính toán trong báo cáo hiệu lực của CALTS.
Chú thích: Cơ sở cho Dhrt (95 %) = 0,025 m được nêu trong C.1.3.3.
4.5.2.6 Độ không đảm bảo đo Dfm ở tần số đo được fmax như xác định trong 4.4.6, được cho bởi
![]()
trong đó
Dfmax được xác định trong 4.4.6.2; và
Dft tính cho độ nhạy fmax với các dung sai tham số (các giá trị lớn nhất được cho trong Bảng 2).
Chú thích: Dft có thể được tính bằng cách sử dụng mô hình cho trong C.1.3.4.
4.5.2.7 Nếu dung sai của các tham số phù hợp với các giá trị cho trong Bảng 2, thì Dft (95 %)/fc = 0,015 có thể được dùng ở ba độ cao qui định của anten thu. Trong trường hợp này, không cần phải tính Dft và cũng không cần ghi lại kết quả tính toán trong báo cáo hiệu lực của CALTS.
Chú thích: Cơ sở cho Dft (95 %)/fc = 0,015 được nêu trong C.1.3.4.
4.5.3 Tiêu chí phù hợp
Trong điều này, các giá trị tham số cần thiết để tính toán là các giá trị thực tế có được trong một phép đo. Các giá trị tham số thực tế này xem như được xác định với độ không đảm bảo đo đủ nhỏ sao cho chứng minh được giá trị tham số nằm trong dải dung sai lớn nhất như cho trong Bảng 2 là đúng.
Ví dụ - Nếu khoảng cách qui định giữa tâm anten d = 10,00 m (4.4.2.3) và trong quá trình đo SA thực tế khoảng cách này là da = 10,01 m, thì dùng giá trị của da vào phép tính. Tuy nhiên (d-da) phải luôn nhỏ hơn 0,04 m (xem Bảng 2), trong khi da được xác định với độ không đảm bảo đo đủ nhỏ sao cho chứng tỏ được |d – da | < 0,04="">
4.5.3.1 CALTS tuân thủ các tiêu chí về hiệu lực độ suy giảm vị trí nếu, ở mọi tần số sử dụng để hiệu chuẩn anten (Hình 5) thì:
|SAc (dB) - SAm (dB)| <>SA (dB) - DSAm (dB) (8)
trong đó
SAc(f) là SA lý thuyết ở tần số qui định, được tính như mô tả ở Phụ lục C, sử dụng dữ liệu anten thử nghiệm có được sau khi áp dụng 4.3.2.6 và sử dụng các giá trị tham số hình học thực tế La, d, ht và hr;
SAm(f) là SA đo được theo công thức (1) hoặc công thức (2) (xem thêm chú thích);
D SAm(f) là độ không đảm bảo đo SA (độ tin cậy 95 %) như rút ra trong 4.5.2.2;
TSA(f) là dung sai cho phép theo SA.
Nếu không có qui định nào khác trong tiêu chuẩn hiệu chuẩn anten có yêu cầu sử dụng CALTS, thì dung sai cho phép TSA(f) = 1,0 dB đối với toàn bộ dải tần từ 30 MHz đến 1 000 MHz.
Ít nhất là phải chứng tỏ được CALTS tuân thủ các tiêu chí SA ở các tần số liệt kê trong Bảng 1.
Chú thích 1: ở tần số từ 30 MHz đến 40 MHz, giá trị SAm cần được hiệu chỉnh khi đỉnh của anten dây bị võng xuống đáng kể.
a) Ở tần số 30 MHz, lưỡng cực dài 4,8 m bị võng xuống khoảng 16 cm ở đỉnh. SAm cần được tăng lên một lượng là 0,27 dB, 0,13 dB và 0,08 dB khi lưỡng cực ở độ cao 1 m, 2 m và 4 m, tương ứng, để thích hợp cho việc so sánh SAm với SAc.
b) Nếu độ võng ở đỉnh nhiều hơn 20 cm thì việc tăng SAm(f) cần được tính bằng số (xem điều C.2).
Chú thích 2: Ví dụ
Nếu DSAt (95 %) = 0,2 dB (áp dụng 4.5.2.3) và DSAr (95 %) = 0,2 dB, thì khi đó DSAm (95 %) = 0,3 dB. Do đó, 0,7 dB là mức chênh lệch lớn nhất chấp nhận được giữa độ suy giảm vị trí tính được và đo được. Mức chênh lệch lớn nhất chấp nhận được có thể tăng lên bằng cách sử dụng máy thu có giá trị DSAr (95 %) thấp hơn, bằng cách giảm dung sai của các tham số khác nhau và bằng cách xem xét giá trị DSAt (95 %) thực tế.
Hình 5 - Quan hệ giữa các đại lượng sử dụng trong tiêu chí phù hợp SA
4.5.3.2 CALTS tuân thủ các tiêu chí về độ cao anten thu đối với giá trị SA lớn nhất nếu ở các tần số fs cho trong 4.4.3.2 a):
| hrc (m) - hr,max (m)| <>hr (m) - Dhrm (m) (7)
trong đó
hrc(m) là độ cao lý thuyết của anten thu ở đó xuất hiện giá trị SA lớn nhất, nghĩa là tín hiệu truyền nhỏ nhất, được tính như mô tả ở Phụ lục C, sử dụng dữ liệu anten thử nghiệm có được sau khi áp dụng 4.3.2.7 và sử dụng các tham số hình học thực tế La, d, ht và tần số thực tế fs;
hr,max(m) là độ cao anten thu có được từ qui trình nêu ở 4.4.5;
Dhrm(m) là độ không đảm bảo đo về độ cao anten thu (độ tin cậy 95 %) như rút ra trong 4.5.2.4;
Thr(m) là dung sai cho phép của hr,max.
Nếu không có qui định nào khác trong tiêu chuẩn hiệu chuẩn anten có yêu cầu sử dụng CALTS, thì dung sai cho phép là Thr = 0,05 m.
Chú thích: Có thể áp dụng 4.5.3.2 hoặc 4.5.3.3; xem thêm 4.4.3.2.
4.5.3.3 CALTS tuân thủ các tiêu chí tần số đối với SA lớn nhất nếu, ở độ cao anten thu hrs, với anten được điều hưởng đến tần số kết hợp fs liệt kê trong 4.4.3.2 b) có:
|fc (MHz) - fmax (MHz)| <>f - Dfm (MHz) (8)
trong đó
fc(MHz) là tần số lý thuyết tại đó xuất hiện giá trị SA lớn nhất, nghĩa là tín hiệu truyền nhỏ nhất, được tính như mô tả ở Phụ lục C, sử dụng dữ liệu anten thử nghiệm có sau khi áp dụng 4.3.2.7 và sử dụng các tham số hình học thực tế La, d, ht và hrs ;
fmax(MHz) là tần số đo được lấy từ qui trình nêu ở 4.4.6;
Dfm(MHz) là độ không đảm bảo đo tần số (độ tin cậy 95 %) như rút ra trong 4.5.2.6; Tf là dung sai cho phép của fmax.
Nếu không có qui định nào khác trong tiêu chuẩn hiệu chuẩn anten có yêu cầu sử dụng CALTS, thì dung sai cho phép là Tf = 0,03 fc.
Chú thích: Có thể áp dụng 4.5.3.2 hoặc 4.5.3.3; xem thêm 4.4.3.2.
4.6 Báo cáo hiệu lực
4.6.1 Lời giới thiệu
Tiêu chuẩn này qui định các yêu cầu, qui trình đánh giá hiệu lực và tiêu chí phù hợp đối với CALTS. Qui trình đánh giá hiệu lực này kết thúc bằng việc biên tập và phê chuẩn “báo cáo hiệu lực CALTS”.
Báo cáo hiệu lực là phương tiện để chỉ ra và bảo đảm sự tuân thủ các yêu cầu của CALTS đặt ra trong tiêu chuẩn này.
Chủ nhân của CALTS hoặc các bên khác có thể chịu trách nhiệm về biểu hiện thực tế tính hiệu lực của CALTS.
Báo cáo hiệu lực của CALTS phải phù hợp với các yêu cầu nêu trong 4.6.2.
4.6.2 Các yêu cầu đối với báo cáo hiệu lực
Báo cáo hiệu lực CALTS phải nêu một số hạng mục, mỗi hạng mục đề cập đến một khía cạnh hiệu lực của CALTS. Từng hạng mục và chứng minh cho nội dung trong báo cáo hiệu lực được mô tả dưới đây. Danh mục liệt kê tóm tắt đối với các hạng mục cần nêu được cho trong Phụ lục F.
a) Thông tin chung
Thông tin chung như vị trí, chủ nhân chịu trách nhiệm của CALTS, v.v… phải được nêu trong báo cáo.
Nếu việc đánh giá hiệu lực vị trí được tiến hành bởi các bên/tổ chức khác, thì khi đó phải chỉ ra các bên/tổ chức này.
Cấu hình của CALTS, cũng như các linh kiện phụ trợ phải được mô tả bằng cách dùng bản vẽ, ảnh, số lượng các bộ phận, v.v…
Ngoài ra, phải đề ngày thực hiện việc đánh giá hiệu lực và ngày phát hành báo cáo hiệu lực. Tên của những người chịu trách nhiệm về soạn thảo và phê duyệt báo cáo hiệu lực phải được thể hiện trên trang bìa, kể cả chữ ký của họ.
b) Đánh giá chu kỳ hiệu lực và giới hạn các điều kiện
Như trên đã nêu, tính hiệu lực phải được chứng tỏ trước khi hiệu chuẩn anten (xem 4.2.2a).
Do đó, điều quan trọng là chỉ ra chu kỳ hiệu lực mong muốn của CALTS đang xem xét. Vì CALTS có thể là hệ thống trong nhà hoặc ngoài trời, nên tính hiệu lực mong muốn của CALTS có thể khác nhau và có thể bị ảnh hưởng bởi các yếu tố khác nhau như thay đổi môi trường, lão hóa cáp hoặc lão hóa bộ hấp thụ. Trách nhiệm của chủ hệ thống là đánh giá và công bố chu kỳ hiệu lực của việc đánh giá hiệu lực CALTS.
Liên quan đến việc đánh giá hiệu lực này, phải nhận biết được các hạng mục hoặc các khía cạnh có thể phải chịu sự thay đổi trong quá trình sử dụng hệ thống: ví dụ đối với loại ngoài trời: môi trường, cây cối, tuyết, độ ẩm của đất, v.v… Nói chung, độ ổn định tính năng của cáp, thiết bị, anten và cột anten là quan trọng. Điều kiện môi trường, lão hóa dụng cụ hoặc bộ hấp thụ và hiệu lực của việc hiệu chuẩn thiết bị cũng có thể quyết định chu kỳ hiệu lực của CALTS.
Có thể kết hợp các phương tiện trợ giúp phép đo nhanh hoặc các qui trình kiểm tra bằng mắt để đánh giá liên tục tính hiệu lực/sự đồng nhất về tính năng của CALTS.
Các điều kiện hoặc các giới hạn về môi trường hoặc cấu hình cụ thể phải được nêu rõ.
c) Mô tả và đánh giá hiệu lực của anten thử nghiệm
Hạng mục này của báo cáo hiệu lực đề cập đến việc chứng tỏ sự phù hợp với các yêu cầu của anten.
Anten thử nghiệm (các thành phần và các bộ biến đổi cân bằng-không cân bằng) phải tuân thủ các yêu cầu kỹ thuật qui định nêu trong 4.3.2 và các giá trị áp dụng được nêu trong Bảng 2.
Từng hạng mục trong yêu cầu kỹ thuật qui định phải được kiểm tra sự phù hợp bằng cách xem xét hoặc bằng phép đo. Kết quả kiểm tra sự phù hợp phải được nêu trong Phụ lục hoặc trong tài liệu riêng (ảnh, kết quả đo, kết quả hiệu chuẩn, báo cáo của nhà cung ứng, v.v…).
d) Bố trí thử nghiệm
Hạng mục này của báo cáo hiệu lực đề cập đến bằng chứng trên bố trí thử nghiệm. Bố trí thử nghiệm phải tuân thủ các yêu cầu kỹ thuật qui định nêu trong 4.4.2 và các giá trị áp dụng được nêu trong Bảng 2.
Từng hạng mục trong yêu cầu kỹ thuật qui định phải được kiểm tra sự phù hợp bằng cách xem xét hoặc bằng phép đo. Kết quả kiểm tra sự phù hợp phải được nêu trong phụ lục hoặc trong tài liệu riêng.
e) Phép đo đánh giá hiệu lực
Kết quả của phép đo đánh giá hiệu lực độ suy giảm vị trí tiến hành theo qui trình nêu trong 4.4.4 và tại tần số và độ cao anten thử nghiệm nêu trong Bảng 1 phải được mô tả trong phần này của báo cáo đánh giá hiệu lực. Ngoài ra, kết quả của phép đo quét độ cao (4.4.5) hoặc phép đo quét tần số của anten (4.4.6) phải được ghi trong hạng mục này.
f) Tính độ suy giảm vị trí anten và dung sai
Hạng mục này của báo cáo thử nghiệm phải chỉ ra chiều dài anten được tính bằng cách sử dụng qui trình ở Phụ lục C hay sử dụng qui trình tính bằng số khác. Kết quả tính độ suy giảm vị trí và kết quả các tính toán độ không đảm bảo đo tổng phải được đưa ra trong hạng mục này dùng giá trị ngầm định hoặc giá trị tính được trong trường hợp sai lệch so với dung sai trong Bảng 2.
g) Tính toán các tiêu chí phù hợp
Trong hạng mục này của báo cáo hiệu lực, kết quả của giá trị SA tính được và đo được, dung sai và độ không đảm bảo cho phép tương ứng được dùng trong công thức (6) để xác định sự phù hợp là hàm số phụ thuộc tần số. Tương tự, sự phù hợp với các tiêu chí độ cao (công thức (7)) hoặc tiêu chí quét tần số (công thức (8)) sẽ được xác định.
h) Kết luận sự phù hợp
Với điều kiện là độ suy giảm vị trí đo được phù hợp với công thức (6) ở mọi tần số và thỏa mãn các điều kiện về tiêu chí quét độ cao hoặc tần số, khi đó CALTS đang xem xét có thể được công bố phù hợp với các yêu cầu của CALTS có tính đến chu kỳ hiệu lực, giới hạn các điều kiện đã nêu và các cấu hình nêu trong điểm b).
4.7 Đánh giá hiệu lực CALTS đối với phân cực thẳng đứng
Đang xem xét.
4.7.1 Lời giới thiệu
4.7.2 Yêu cầu kỹ thuật về vị trí
4.7.3 Qui trình đánh giá hiệu lực
4.7.4 Tiêu chí phù hợp
4.7.5 Báo cáo đánh giá hiệu lực
Phụ lục A
(tham khảo)
Yêu cầu về CALTS
A.1 Lời giới thiệu
Nói chung, yêu cầu kỹ thuật mang tính qui định là CALTS cũng sẽ là một vị trí thử nghiệm thoáng (OATS). Tuy nhiên, yêu cầu kỹ thuật mang tính qui định không yêu cầu CALTS phải luôn luôn là một OATS. Do đó, CALTS có thể được bảo vệ khỏi ảnh hưởng thời tiết, đặt trong một khu vực muối mặn, v.v… với điều kiện là thỏa mãn tất cả các yêu cầu kỹ thuật qui định.
Chi tiết vị trí thử nghiệm có thể xem trong điều 5 của CISPR 16-1-4, còn thông tin bổ sung được nêu dưới đây. Cần đặc biệt chú ý khi cung cấp cho người sử dụng tiêu chuẩn này cùng với tài liệu tham khảo (xem điều A.4).
A.2 Mặt phẳng phản xạ
A.2.1 Kết cấu mặt phẳng phản xạ
Vật liệu mặt phẳng phản xạ có thể là một tấm không có lỗ hoặc một mạng lưới dây. Tấm hoặc mạng này cần ưu tiên hàn liền tại các đường nối hoặc hàn cách quãng dọc theo đường nối <>lmin/10, trong đó lmin là bước sóng kết hợp với tần số lớn nhất cần xem xét. Nếu chọn lưới dây, cần phải chú ý để các dây giao nhau tạo tiếp xúc dẫn điện tốt với nhau. Chiều rộng ô lưới phải <>lmin /10.
Chiều dày của vật liệu được xác định bởi các yêu cầu về độ bền cơ và độ ổn định. Độ dẫn điện bằng hoặc tốt hơn của sắt là đủ cao. Hình dạng của mặt phẳng không quan trọng với điều kiện là mặt phẳng không phải là hình elip (xem A.2.2). Mặt phẳng phản xạ không được phủ bằng lớp bảo vệ có chiều dày
đáng kể, vì lớp này có thể làm thay đổi pha của sóng phản xạ, nghĩa là nó làm cho góc F ở 4.4.1 khác với p rađian [A.4]*. Đối với thông tin về độ phẳng và độ gồ ghề của mặt phẳng, xem 5.6 và [A.3]. Độ phẳng ± 10 mm thường là đủ đối với phép đo đến 1 000 MHz.
Các kích thước theo chiều ngang của mặt phẳng phải đủ rộng để ảnh hưởng do kích thước có hạn của mặt phẳng lên biên dự phòng của độ không đảm bảo đo kết hợp với hiệu chuẩn anten là đủ thấp. Không may là chưa có sẵn mô hình lý thuyết thể hiện quan hệ giữa kích thước mặt phẳng nằm ngang nhỏ nhất với biên dự phòng độ không đảm bảo đo lớn nhất qui định do việc hiệu chuẩn anten. Tiêu chí có thể đưa ra là vùng Fresnel thứ nhất cần được hợp nhất trong mặt phẳng phản xạ ([A.1], [A.2] và [A.3]). Điều này dẫn đến mặt phẳng có kích thước nhỏ nhất là 20 m (chiều dài) x 15 m (chiều rộng), nhưng mặt phẳng nhỏ hơn cũng có thể thoả mãn các yêu cầu của CALTS. Tại tần số thấp nhất (30 MHz) chiều dài La của anten thử nghiệm là khoảng 5 m. Do đó, trong trường hợp mặt phẳng 20 m x 15 m, khoảng cách giữa hình chiếu của bố trí hiệu lực trên mặt phẳng và mép của mặt phẳng ít nhất là La tại mọi tần số trong dải tần từ 30 MHz đến 1 000 MHz.
A.2.2 Hiệu ứng mép mặt phẳng và xung quanh mặt phẳng
Khi giới hạn các kích thước của mặt phẳng phản xạ, mép của mặt phẳng đó tự động có sự chuyển đổi sang mức trung bình với các đặc tính phản xạ khác, do đó sóng điện từ có thể phân tán tại mép đó và gây ảnh hưởng không mong muốn đến kết quả đo. Độ phân tán ở mép thường đáng kể đối với các kết quả phân cực thẳng đứng, nhưng đối với các kết quả phân cực ngang thì không đáng kể [A.7].
Trong số các yếu tố khác, lượng phân tán phụ thuộc vào việc mặt phẳng phản xạ có nằm trong cùng mặt phẳng với vùng đất xung quanh (đất ẩm hoặc khô có thể gây ảnh hưởng khác nhau [A.5]) hay mặt phẳng phản xạ được nâng cao, ví dụ như đặt trên mái. Kết quả nghiên cứu có thể thấy ở [A.6], trong đó chứng tỏ rằng mặt phẳng phản xạ không bao giờ được có hình dạng của elip Fresnel thứ nhất, vì trong trường hợp đó, độ không đảm bảo do phân tán tại mép gây ra có thể tích lũy lại.
Mép của mặt phẳng phản xạ có thể được nối đất nhiều điểm đến vùng đất xung quanh và nếu đất này có độ dẫn điện tốt, ví dụ khi ẩm, thì nó tạo nên độ giãn nở tốt với mặt phẳng phản xạ kim loại [A.7].
Nếu có vật cản phản xạ đáng kể nằm cách đường biên của mặt phẳng phản xạ 40 m thì cần chứng minh là ảnh hưởng của các vật cản này có thể bỏ qua. Việc kiểm tra này có thể thực hiện bằng phép đo quét tần số sử dụng lưỡng cực có chiều dài cố định. Các phép đo như vậy được so sánh với các phép đo mô tả ở 4.4.6. Có thể chọn anten có chiều dài cố định (điều hưởng đến tần số fr), dải quét tần số liên quan và độ cao cố định hr của anten thu trong trường hợp anten phát có ht = 2 m được cho trong Bảng A.1. Dải rộng gần đúng tính được bằng cách sử dụng kỹ thuật số như NEC (xem điều C.3) [C.5].
Bảng A.1 - Phối hợp giữa anten lưỡng cực có chiều dài cố định, dải quét tần số và độ cao anten thu
|
fr MHz |
Bs MHz |
hr m |
|
60 180 400 700 |
30 đến 100 100 đến 300 300 đến 600 600 đến 1 000 |
4,0 1,8 1,2 1,4 |
Nếu không có gì bất thường, đáp tuyến sẽ biến đổi đều đặn. Nếu có bất thường, cộng hưởng dải hẹp tương đối sẽ chồng lên đáp tuyến này. Các cộng hưởng này nhận biết chính xác các tần số tại đó phản xạ từ các vật cản là kém nhất. Việc định vị vật cản nghi ngờ có thể được kiểm tra tại các tần số này bằng cách phóng đại ảnh hưởng của nó nhờ việc đặt một tấm kim loại rộng ở phía trước nó, định hướng ở góc đem lại hiệu ứng lớn nhất.
A.3 Thiết bị phụ trợ
Cần chú ý rằng vật liệu làm cột anten, bộ nối, dây cáp, ảnh hưởng về độ ẩm của cột và dây cáp, thanh đỡ cáp, bộ nối, khả năng có bàn xoay nếu CALTS được dùng như một COMTS đều không làm ảnh hưởng đến kết quả đo. Trong trường hợp này, phép đo quét tần số như đề cập ở A.2 có thể phát hiện các vấn đề tồn tại.
A.4 Tài liệu tham khảo
[A.1] Tiêu chuẩn ANSI C63.4, 1992, Phương pháp đo phát xạ tạp tần số rađiô từ thiết bị điện và điện tử điện áp thấp trong dải tần từ 9 kHz đến 40 GHz, 1992.
[A.2] Phép đo anten vi sóng, Hollis, J.S., Lion T.J. và Clayton L. (chủ bút), Liên hợp khoa học Atlanta, Atlanta, GA, USA, 1986.
[A.3] Phát và truyền sóng điện từ, Sander K.F. và Reed G.A.L., Cơ quan thông tấn Đại học Cambridge, Cambridge, UK, 1987.
[A.4] Chú giải về đặc điểm vị trí trường mở, Livshits B. và Harpell K., Hội nghị chuyên đề IEEE về EMC, Denver, trang 352-355, 1992.
[A.5] Độ suy giảm vị trí đối với các điều kiện mặt đất khác nhau, Sugiura A., Shimizu Y. và Yamanak Y., Văn kiện hội nghị IEICE, E73, 9, trang 1517-1523, tháng 9, 1990.
[A.6] Thí nghiệm hình dạng và kích thước mặt phẳng đất đối với phép đo phát xạ điện từ phát, Berquist A.P. và Bennett W.S., Hội nghị chuyên đề EMC/ESD, Denver, USA, trang 211-217, 1992.
[A.7] Hiệu chuẩn anten EMC và thiết kế vị trí trường mở, Salter M.J. và Alexander M.J., Khoa học kỹ thuật đo lường, 2, trang 510519, 1991.
[A.8] Hiệu chuẩn anten sử dụng cho phép đo phát bức xạ trong kiểm soát nhiễu điện từ (EMI), Tiêu chuẩn ANSI C63.5, 1988.
Phụ lục B
(tham khảo)
Xem xét anten thử nghiệm
Ví dụ về anten thử nghiệm được đưa ra trong điều B.1, còn điều B.2 đề cập đến việc xác định tính năng của bộ biến đổi cân bằng-không cân bằng từ phép đo tham số S, và/hoặc phép đo theo phương pháp truyền, như đề cập ở 4.3.2.6.
B.1 Ví dụ về anten thử nghiệm
Ví dụ về anten thử nghiệm, dựa trên [B.1]*, được cho trên Hình B.1. Bộ biến đổi cân bằng-không cân bằng của anten gồm:
a) mạch ghép lai 3 dB 180o có cổng tổng (S) luôn được nối với trở kháng tải đặc trưng (giả thiết là 50 W), và cổng hiệu (D) là cổng đầu vào/đầu ra của anten thử nghiệm.
b) cáp đồng trục nửa cứng nối đến cổng cân bằng A và B của mạch ghép lai qua bộ nối chất lượng cao, ví dụ như bộ nối SMA. Cáp có chiều dài xấp xỉ 1 m, chiều dài này cũng là khoảng cách của anten dây so với cột và bộ ghép phản xạ;
c) các hạt ferit (F) xung quanh cáp nửa cứng để làm hạn chế cảm ứng của dòng điện phương thức chung trên bộ biến đổi cân bằng-không cân bằng và cáp anten được nối;
d) bộ suy giảm 3 dB tại đầu ra của cáp nửa cứng làm nhiệm vụ ổn định trở kháng hoặc đệm phối hợp trở kháng (M), tại đó các phần tử dây được nối đến qua bộ nối SMA. Các bộ nối này hình thành cổng A và B (hoặc cổng C và D) đề cập ở 4.4.4 và Phụ lục C. Các dây dẫn ngoài của các bộ nối này được tiếp xúc điện gần anten dây. Điểm tiếp xúc này là điểm chuẩn của bộ biến đổi cân bằng-không cân bằng khi thực hiện phép đo tham số S.
Cần chú ý rằng bộ biến đổi cân bằng-không cân bằng được đề cập ở trên chỉ là một ví dụ của bộ biến đổi cân bằng-không cân bằng hữu ích. Cũng có thể sử dụng các loại bộ biến đổi cân bằng-không cân bằng khác. Trên thực tế mọi loại bộ biến đổi đều được phép sử dụng miễn là thỏa mãn các yêu cầu đặt ra ở 4.3.2.
Phần tử dây cần có chiều dài sao cho sau khi đấu nối, anten thử nghiệm thỏa mãn yêu cầu La(f) như đặt ra ở 4.3.2.2 (xem C.1.1 để tính toán La(f)). ở Bảng C.1 giả định là nếu f < 180="" mhz="" thì="" đường="" kính="" của="" phần="" tử="" dây="" là="" 10="" mm,="" như="" thế="" sẽ="" đem="" lại="" độ="" bền="" cơ="" tốt="" cho="" anten="" dây="" tương="" đối="" dài.="" ở="" bảng="" c.1="" cũng="" giả="" thiết="" là="" nếu="">f ³ 180 MHz thì đường kính thích hợp của phần tử dây là 3 mm. Tại tần số f < 60="" mhz,="" các="" thành="" phần="" có="" thể="" là="" kiểu="" ống="" lồng="" hoặc="" có="" thể="" làm="" từ="" anten="" lưỡng="" cực="" có="" chiều="" dài="" cố="" định="" (xem="" phụ="" lục="">
B.2 Xác định thuộc tính của bộ biến đổi cân bằng-không cân bằng
B.2.1 Bộ biến đổi cân bằng-không cân bằng lý tưởng tổn hao thấp
Bộ biến đổi cân bằng-không cân bằng lý tưởng tổn hao thấp được đặc trưng bởi việc có tín hiệu tại cổng A và B bằng nhau về biên độ và lệch pha đúng 180o, với điều kiện là cả ba cổng (xem Hình B.2) đều nối với trở kháng đặc tính. ở cùng điều kiện, không có cổng nào phản xạ tín hiệu vào và tín hiệu vào ở cổng 2 không truyền đến cổng 3 (và ngược lại).
F - bột ferit
M - đệm phối hợp
CHÚ THÍCH: Bộ biến đổi cân bằng-không cân bằng sử dụng mối nối lai đồng trục.
Hình B.1 - Ví dụ về anten thử nghiệm
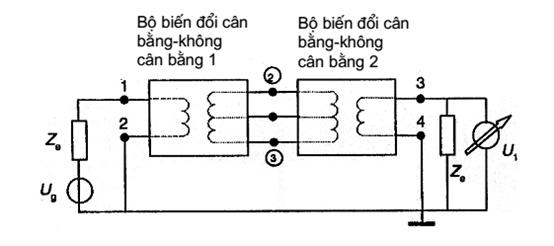
Hình B.2 - Sơ đồ phép đo S11 và S12; S22 và S21 khi máy phát tín hiệu và tải đổi chỗ cho nhau (trong hình này việc đổi chỗ được thực hiện bằng cách đặt cả hai chuyển mạch sang vị trí còn lại của chúng)
Bố trí cơ bản để đo tham số S được cho trên Hình B.2. Cổng đầu vào/đầu ra không cân bằng của bộ biến đổi cân bằng-không cân bằng được đánh số “1” và các cổng cân bằng được đánh số “2” và “3”.
Giả thiết là trở kháng đặc trưng của mỗi cổng trong số ba cổng bằng 50 W (xem 4.3.2.5). So sánh với Hình B.1, bộ biến đổi cân bằng-không cân bằng hoàn chỉnh (mạch ghép, cáp, v.v…) được biểu diễn trên Hình B.2 bằng một hộp ghi nhãn “Bộ biến đổi cân bằng-không cân bằng”. Cổng S của mạch ghép lai trên Hình B.1 luôn được nối với trở kháng đặc trưng của nó và, do đó, không giữ vai trò gì.
Tham số S đưa ra quan hệ giữa sóng tới biểu diễn trên Hình B.2 bởi a1 hoặc a2 và sóng phân tán biểu diễn bởi b1 và b2. Tín hiệu tới và tín hiệu phân tán được đo bằng bộ phân tích thông qua mạch ghép trực tiếp (D). Tham số S11 = b1/a1 và S21 = b2/a1 (ở điều kiện a2 = 0) được đo với cổng 3 được nối đến tải 50 W. Đổi chỗ máy phát tín hiệu và tải (bằng cách đổi vị trí của cả hai chuyển mạch) dẫn đến phép đo S22 = b2/a2 và S12 = b1/a2 (ở điều kiện a1 = 0). Tương tự, nối cổng 2 với tải 50 W và đo giữa cổng 1 và cổng 3, thu được S11 và S13, S31 và S33. Cuối cùng, nối cổng 1 với tải 50 W và đo giữa cổng 2 và cổng 3, thu được (một lần nữa) S22 và S33, S23 và S32.
Ma trận tham số S đối với bộ biến đổi cân bằng-không cân bằng lý tưởng tổn hao thấp được cho bằng công thức dưới đây:

Trong ma trận S này, S11 = S22 = S33 = 0 vì không có phản xạ tại các cổng này. S12 = S21 = 1 và S13 = S31 = -1 vì đối xứng hoàn toàn (giá trị tuyệt đối bằng nhau và bằng 1 vì bộ biến đổi cân bằng-không cân bằng này là loại tổn hao thấp) và lệch pha đúng bằng 180o (chỉ ra bằng dấu trừ). Cuối cùng, S23 = S32 = 0 vì cách ly giữa cổng 2 và cổng 3 là tuyệt đối.
B.2.2 Quan hệ giữa các thuộc tính của bộ biến đổi cân bằng-không cân bằng và tham số S
Ma trận S có thể chuyển đổi thành ma trận trở kháng, thể hiện quan hệ dòng điện vào, ra với điện áp của bộ biến đổi cân bằng-không cân bằng. Nối cổng 1 vào trở kháng đặc trưng và chỉ xét cổng 2 và cổng 3, có thể chỉ ra rằng (xem [B.2]):
![]()
do đó trở kháng ZAB [xem 4.3.2.5 a)] được cho bởi công thức sau:

Giá trị ZAB đo được cần thiết khi tính toán SAc (xem Phụ lục C). Trở kháng ZCD đối với bộ biến đổi cân bằng-không cân bằng khác cần thiết cho việc tính toán được xác định tương tự.
VSWR liên quan tuân thủ 4.3.2.5 a) và Bảng 2 nếu:
![]() < 1,10="" trong="" đó="">G =
< 1,10="" trong="" đó="">G = ![]() (B.4)
(B.4)
Chú thích: Nếu bản thân mạch ghép lai không tuân thủ yêu cầu được diễn đạt trong công thức (B.4), thì VSWR có thể được giảm xuống bằng cách sử dụng bộ suy giảm phối hợp (M ở Hình B.1) có VSWR rất thấp.
Cân bằng và độ lệch pha của bộ biến đổi cân bằng-không cân bằng thực được kiểm tra bằng cách xét
![]() =
= ![]() =
rbe ẹFb (B.5)
=
rbe ẹFb (B.5)
Cân bằng biên độ phù hợp với 4.3.2.5 b) và Bảng 2 nếu
0,95 <>rb < 1,05="">
và cân bằng pha phù hợp với 4.3.2.5 c) và Bảng 2 nếu
178o
<>![]() <> o (B.7)
<> o (B.7)
Độ cách ly của bộ biến đổi cân bằng-không cân bằng thực được kiểm tra bằng cách xét giá trị thực của S23 và S32. Giá trị này phù hợp với 4.3.2.5, chú thích 4 nếu
|S23| = |S32| < 0,05="">
Tổn hao có thể có trong bộ biến đổi cân bằng-không cân bằng thực được tính đến trong quá trình đo điện áp chuẩn Ur trong qui trình đánh giá hiệu lực CALTS. Đối với bộ biến đổi cân bằng-không cân bằng dùng trong ví dụ và mô tả trên Hình B.1, phần đóng góp quan trọng vào tổn hao bắt nguồn từ bộ đệm phối hợp 3 dB.
B.2.3 Phép đo tổn hao do có bộ biến đổi cân bằng-không cân bằng
Có thể kiểm tra các yêu cầu kỹ thuật của bộ biến đổi cân bằng-không cân bằng đề cập ở 4.3.2.5 b) và 4.3.2.5 c) bằng cách thực hiện phép đo tổn hao do có bộ biến đổi cân bằng-không cân bằng mô tả trên Hình B.3 và B.4. Từ các kết quả, có thể xác định được mức loại bỏ không cân bằng của bộ biến đổi cân bằng-không cân bằng (BUR).
Hình B.3 - Giản đồ về xác định tổn hao do có bộ biến đổi cân bằng-không cân bằng A1(f)
Hình B.4 - Giản đồ về xác định tổn hao do có bộ biến đổi cân bằng-không cân bằng A2(f)
Phép đo bao gồm việc xác định tổn hao do có thiết bị cần thử nghiệm A1(f) của hai bộ biến đổi cân bằng-không cân bằng giống hệt nhau nối đầu-với-đầu như nêu ở 4.4.4.1, và xác định tổn hao do có bộ biến đổi cân bằng-không cân bằng A2(f) đối với một bộ biến đổi cân bằng-không cân bằng khi cổng 2 và 3 cân bằng (xem thêm Hình B.4) được nối song song. Giả thiết là A1 bắt nguồn từ đóng góp ngang nhau của hai bộ biến đổi cân bằng-không cân bằng, sự loại bỏ không cân bằng của bộ biến đổi cân bằng- không cân bằng, còn được gọi là loại bỏ phương thức chung, tính bằng đềxiben, được cho bởi công thức sau:
BUR(f)
= A2(f) - ![]() (dB) (B.9)
(dB) (B.9)
Có thể chỉ ra rằng bộ biến đổi cân bằng-không cân bằng tuân thủ các điều nêu ở trên và các giá trị dung sai bằng số liên quan như cho trong Bảng 2 khi BUR > 28 dB.
Trong phép đo tổn hao do có bộ biến đổi cân bằng-không cân bằng thứ nhất, trước tiên điện áp chuẩn Ur1(f) được xác định như một hàm của tần số trên toàn bộ băng tần qui định đối với bộ biến đổi cân bằng-không cân bằng. Mạch đo là mạch cho trên Hình B.3 không có hai bộ biến đổi cân bằng-không cân bằng nhưng có nối tắt giữa các điểm nối 1, 3 và 2, 4. Tiếp theo, điện áp U1(f) được đo sau khi lắp đặt hai bộ biến đổi cân bằng-không cân bằng nối đầu-đầu (xem Hình B.3). Sau đó, A1(f), tính bằng đềxiben, được cho bởi công thức sau:
A1(f)
= 20log10  (dB) (B.10)
(dB) (B.10)
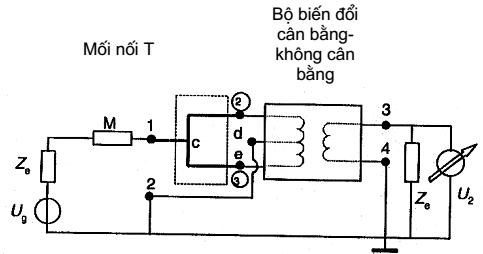
Trong phép đo tổn hao do có bộ biến đổi cân bằng-không cân bằng thứ hai, trước tiên điện áp chuẩn Ur2(f) được xác định như một hàm của tần số trên toàn bộ băng tần qui định đối với bộ biến đổi cân bằng-không cân bằng. Mạch đo là mạch cho trên Hình B.4 không có phân nhánh dạng T và bộ biến đổi cân bằng-không cân bằng nhưng có ngắn mạch giữa các điểm nối 1, 3 và 2, 4. Tiếp theo, điện áp U2a(f) được đo sau khi lắp đặt phân nhánh dạng T và bộ biến đổi cân bằng-không cân bằng cần kiểm tra (xem Hình B.4). Trong phép đo này, cổng 2 và 3 (xem thêm Hình B.2) được nối song song qua phân nhánh dạng T đồng trục đối xứng, kết cấu từ cáp nửa cứng và phần c-d và c-e của T có cùng chiều dài điện (đối xứng cơ hoàn toàn). Trong phép đo này d được nối đến cổng 2 và e nối đến cổng 3. Bộ suy giảm đệm phối hợp 6 dB, chỉ ra bằng M ở Hình B.4, được bổ sung nhằm tránh hiệu ứng sóng đứng.
Để ngăn ngừa sai số do các ảnh hưởng ký sinh gây ra, lặp lại phép đo thứ hai sau khi đảo nối giữa bộ biến đổi cân bằng-không cân bằng và phân nhánh dạng T, nghĩa là, d được nối đến cổng 3 và e nối đến cổng 2. Phép đo này cho điện áp U2b(f). Khi đó A2(f), tính bằng đềxiben, được cho bởi công thức sau:
A2(f)
= 20log10  (B.11)
(B.11)
Đối với bộ biến đổi cân bằng-không cân bằng lý tưởng, A2(f) = ¥ dB tại mọi tần số.
Chú thích: Có thể sử dụng bộ chia công suất 6 dB đã hiệu chuẩn thay cho phân nhánh dạng T cộng với bộ suy giảm 6 dB này. Trong trường hợp này, độ suy giảm do bộ chia công suất gây ra phải được đưa vào khi tính toán BUR.
B.3 Tài liệu tham khảo
[B.1] Anten tuyến tính tiêu chuẩn, 30-1 000 MHz, FitzGerell R.G., Văn kiện hội nghị IEEE về anten và truyền sóng, AP-34, 12, trang 1425-1429, tháng 12, 1986.
[B.2] Phép đo trở kháng vi sóng, Somlo P.I., Hunter J.D., do Công ty TNHH Peter Peregrinus xuất bản, Luân đôn, Anh, 1985.
[B.3] Độ không đảm bảo đo thấp trong dải tần từ 30 MHz đến 1 GHz sử dụng anten lưỡng cực tiêu chuẩn tính được và mặt phẳng đất chuẩn quốc gia, Alexander M.J. và Salter M.J., Biên bản lưu Khoa học công nghệ đo lường IEE, tập 143, số 4, trang 221-228, tháng 7, 1996.
Phụ lục C
(tham khảo)
Lý thuyết về anten và độ suy giảm vị trí
C.1 Quan hệ theo phân tích
Điều này đề cập phương pháp phân tích gần đúng để tính chiều dài tổng La(f) của anten dây (C.1.1) và độ suy giảm vị trí SAc (C.1.2). Mô hình này có tính đến ghép nối chung giữa anten phát, anten thu và ảnh của chúng trên mặt phẳng phản xạ. Mô hình này cũng tính đến phân bố trường thực dọc theo anten thu, nghĩa là, không giả thiết là trường tới anten thu là sóng phẳng. Giả định duy nhất trong phương pháp này là phân bố dòng điện trên anten dây là hình sin.
Giá trị SAc tính được từ quan hệ phân tích nằm trong khoảng ±0,01 dB của giá trị SAc nhận được từ tính toán bằng số chính xác với điều kiện trong phương pháp phân tích này sử dụng giá trị La của anten dây đủ mỏng. Trong nội dung của tiêu chuẩn này, đủ mỏng nghĩa là bán kính Rwe của anten dây thỏa mãn điều kiện dưới đây [C.1]*:
a = 2ln ![]() với a ³ 30
với a ³ 30
Đối với anten lưỡng cực nửa sóng (La = l0/2), điều kiện này được cho bởi công thức sau:
Rwe
= ![]() với a ³ 30 (C.1)
với a ³ 30 (C.1)
Ví dụ bằng số đầy đủ, bao gồm cả các xem xét về độ không đảm bảo đo được cho ở C.1.3. Phụ lục E đưa ra ví dụ về chương trình máy tính để tính các đại lượng khác nhau.
C.1.1 Tổng chiều dài của anten thử nghiệm
Theo định nghĩa, tổng chiều dài La(f) của anten thử nghiệm, nghĩa là lưỡng cực cộng hưởng không gian tự do tại tần số f tuân thủ khi giải phương trình sau:
Xa (f, Rwe) = 0 (C.2)
trong đó
Xa (f, Rwe) là phần ảo của trở kháng mà lưỡng cực bức xạ vào môi trường trung gian không có ranh giới, nghĩa là, trong không gian tự do;
Rwe là bán kính của phần tử dây, giả thiết là một hằng số dọc theo chiều dài của nó (phần tử không phải kiểu ống lồng) và nhỏ hơn nhiều so với La.
Khe hở điểm nuôi Wg giả thiết là vô cùng nhỏ. Xa được cho bởi công thức sau (xem [C.2]):

trong đó
h = 377 W;
k = 2p/l0; và
l0 là bước sóng trong chân không.
Si(x) và Ci(x) được cho bởi công thức sau:
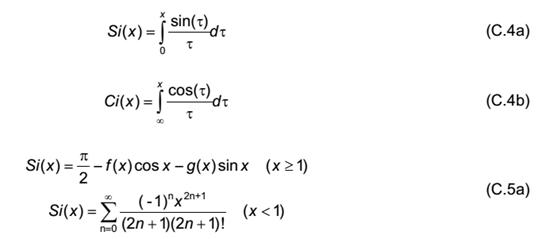
và có thể được tính chính xác từ [C.3]
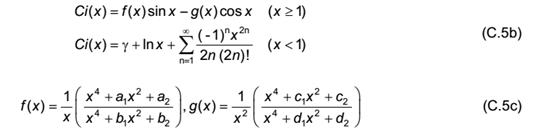
|
với a1 = 7,241163 |
b1 = 9,068580 |
c1 = 7,547478 |
d1 = 12,723684 |
|
a2 = 2,463936 |
b2 = 7,157433 |
c2 = 1,564072 |
d2 = 15,723606 |
Dữ liệu La(f) trong Bảng C.1 được rút ra từ công thức (C.2), dùng công thức (C.3) đến (C.5).
C.1.2 Độ suy giảm vị trí lý thuyết
Độ suy giảm vị trí (SA) được tính bằng cách sử dụng mô hình mạng [C.4] (xem Hình C.1). Máy phát tín hiệu RF cung cấp tín hiệu đến đầu nuôi A và B của bộ biến đổi cân bằng-không cân bằng của anten phát. Tín hiệu đến đầu nuôi C và D của anten thu được đo qua trở kháng máy thu Zr. Cáp và bộ biến đổi cân bằng-không cân bằng được đại diện bằng mạng T.
Hình C.1 - Mô hình mạng để tính SA
 Hình C.2 - Mạch
tương đương của mạng ở Hình C.1
Hình C.2 - Mạch
tương đương của mạng ở Hình C.1
Hình C.3 - Xác định các ghép nối chung, điện áp đầu nuôi và dòng điện anten của các anten đặt phía trên mặt phẳng phản xạ và ảnh của chúng
Khi đo điện áp chuẩn Ur1(f) và Ur2(f) (xem 4.4.4.1 và 4.4.4.4), các đầu nuôi A và C được nối với nhau bằng một dây dẫn ngắn có trở kháng không đáng kể. Tương tự, B và D được nối với nhau. Khi đo Us(f) (xem 4.4.4.3), anten dây nối đến đầu nuôi và anten thử nghiệm ở vị trí qui định, ảnh hưởng của vị trí lên tín hiệu truyền được đại diện bởi mạng T với cổng AB và CD như chỉ ra trên Hình C.1.
Mạch của Hình C.1 có thể đơn giản hóa thành mạch ở Hình C.2, trong đó ZAB và ZCD là trở kháng của cổng cân bằng đo được (xem Phụ lục B). Từ mạch trên Hình C.2 suy ra là khi đo điện áp chuẩn Ur (sao cho Z1 = Z2 = 0 và Z3 = ¥) thì:
UCD
= UCD,r = ![]() Ut (C.6)
Ut (C.6)
Do đó suy ra khi đo Us
![]()
để tính độ suy giảm vị trí tính được SAc dùng công thức

Bước tiếp theo là xét quan hệ giữa các trở kháng Z1, Z2 và Z3 với vị trí thực như mô tả ở Hình C.3, nghĩa là với hai anten thử nghiệm phía trên mặt phẳng phản xạ.
Tín hiệu truyền giữa cổng truyền 1 (các đầu nuôi A và B) và cổng thu 2 (các đầu nuôi C và D) bị ảnh hưởng bởi các ghép nối khác nhau giữa anten và ảnh của chúng. Trên Hình C.3, điều này được chỉ ra bởi trở kháng truyền Znm (n,m: 1 đến 4, n ¹ m).
Điện áp đầu nối UAB và UCD liên quan với dòng điện anten từ I1 đến I4 của bốn anten trên Hình C.3 thông qua
UAB = Z11I1 + Z12I2 + Z13I3 + Z14I4
UCD = Z21I1 + Z22I2 + Z23 I3 + Z24 I4 (C.9)
Đối với mặt phẳng phản xạ lý thuyết và trong trường hợp các anten phân cực ngang đặt song song và thẳng hàng với nhau thì I3 = rI1 và I4 = rI2, trong đó r = rejF là hệ số phản xạ phức của mặt phẳng dẫn.
Trong trường hợp lý tưởng, r = -1 trên cấu hình hiện có. Hơn nữa, do tính nghịch đảo nên Z12 = Z21 và Z23 = Z14. Do đó, công thức (C.9) rút gọn như sau:
UAB = (Z11 + rZ13 )I1 + (Z12 + rZ14 )I2
UCD = Z(12 + rZ14 )I1 + (Z22 + rZ24 )I2 (C.10)
Từ mạch trên Hình C.2 rút ra
UAB = (Z11 + Z3 )I1 + Z3 I2
UCD = Z3I1 + (Z2 + Z3 )I2 (C.11)
và so sánh với công thức (C.10) ta có
Z1 + Z3 = Z11 + rZ13 , Z2 + Z3 = Z22 + rZ24 và Z3 = Z12 + rZ14
do đó, công thức (C.8) có thể viết thành

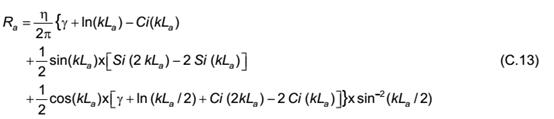
Từ công thức (C.9) ta thấy Z11 và Z22 là trở kháng vào của anten dây bức xạ vào không gian tự do, do đó không có mặt phẳng phản xạ. Phần ảo của trở kháng này có thể tính từ X11 = X22 = Xa như được cho bởi công thức (C.3), phần thực R11 = R22 = Ra được tính như sau:
Trở kháng chung Z12, Z13, Z14 và Z24 có thể tính được dựa trên định lý nghịch đảo Loren [C.1, C.2]. Trong tính toán này, trường thực dọc theo anten dây được đưa vào tính toán, do đó không cần giả định sóng phẳng tới anten thu. Giả thiết duy nhất là phân bố dòng điện trên anten dây là hình sin, được phép nếu La(f) » l0/2 và nếu Rwe thỏa mãn điều kiện cho trong công thức (C.1).
Nếu Znm = Rnm +jXnm (n = 1, …,4, m = 1, …,4, n ¹ m) phần thực được cho bởi công thức sau [C.1]:

Và phần ảo được cho như sau:

trong đó rnm là khoảng cách giữa các tâm của các anten n và m, và
Lúc này SAc, nếu cần thiết theo 4.5.3.1, có thể tính theo công thức (C.12) vì các trở kháng trong công thức này đã biết: ZAB và ZCD từ dữ liệu thực nghiệm (xem Phụ lục B) và các trở kháng khác tính được theo công thức (C.3) và từ (C.13) đến (C.16). Cũng có thể dùng các công thức này để tính SAc(hr) tại tần số đã cho, theo đó xác định hr,max(fs) cần thiết ở 4.5.3.2, và để tính độ không đảm bảo đo DSA và Dhr,max cần thiết ở 4.5.2.2 và 4.5.3.2.
C.1.3 Ví dụ bằng số
Kết quả của ví dụ bằng số được cho trong Bảng C.1: tính La và SAc; Bảng C.2: tính DSAt; Bảng C.3: tính hrc và Dhrt; và Bảng C.4: tính fc và Dft. Ví dụ về chương trình máy tính để tính các dữ liệu này được cho trong Phụ lục E.
Trong mọi phép tính độ cao của anten thu và anten phát, khoảng cách theo phương ngang giữa các tâm của các anten và tần số có giá trị qui định trong 4.4. Khi tính độ không đảm bảo đo, sử dụng các dung sai cho trong 4.5.2.1.
Trong dải tần 30 MHz £ f £ 180 MHz, giả thiết bán kính của anten dây Rwe = 5,0 mm và Rwe = 1,5 mm nếu dải tần là 180 MHz £ f £ 1 000 MHz.
C.1.3.1 Tính La và SAc (Bảng C.1)
Chiều dài anten La(f) được tính từ công thức (C.2). Giá trị của SAc(f) được tính theo các công thức từ (C.13) đến (C.16), giả thiết bộ biến đổi cân bằng-không cân bằng lý tưởng có giá trị ưu tiên trở kháng cổng đối xứng là (100+j0) W, và giả thiết mặt phẳng phản xạ là lý tưởng, nghĩa là r = -1.
C.1.3.2 Tính DSAt (Bảng C.2)
Độ không đảm bảo đo DSAt (4.5.2.2) với độ tin cậy 95 % có thể tính được từ công thức sau (xem [C.6])

giả thiết các biến DSAc(i) phân bố xác suất chữ nhật và tính đến độ không đảm bảo đo theo các biến với p = 9: hr, ht, d, f, ZAB, ZCD, La, Ab và Fb (xem thêm Bảng 2).
Đối với sáu biến số đầu, DSAc có thể được tính từ công thức:
![]()
trong đó
SAc là giá trị danh nghĩa của độ suy giảm vị trí như tính được ở C.1.3.1;
SA(pi + Dpi) và SA(pi - Dpi) là độ suy giảm vị trí tính được với biến số p cộng với dung sai Dp và với p trừ đi dung sai đó.
Kết quả của DSAc gây ra bởi Dhr, Dht, Dd và Df qui định trong Bảng 2 được nêu trong các cột từ 3 đến 6 của Bảng C.2.
Chú thích: Khi tính toán ảnh hưởng của Df, chiều dài anten La được giữ không đổi bằng La tại tần số danh nghĩa. Trong “qui trình SA” ở chương trình máy tính nêu trong Phụ lục E, biến “f0” giữ La không đổi khi thay đổi biến “f” đại diện cho tần số.
Bảng C.1 - Ví dụ bằng số, tính La, SAc (xem C.1.3.1)
|
f MHz |
hr m |
Rwe mm |
La m |
SAc dB |
f MHz |
hr m |
Rwe mm |
La m |
SAc dB |
|
30 |
4,00 |
5,00 |
4,803 |
21,03 |
160 |
2,00 |
5,00 |
0,885 |
26,44 |
|
35 |
4,00 |
5,00 |
4,112 |
20,95 |
180 |
2,00 |
1,50 |
0,797 |
27,52 |
|
40 |
4,00 |
5,00 |
3,594 |
20,60 |
200 |
2,00 |
1,50 |
0,716 |
29,37 |
|
45 |
4,00 |
5,00 |
3,192 |
20,70 |
250 |
1,50 |
1,50 |
0,572 |
30,43 |
|
50 |
4,00 |
5,00 |
2,870 |
21,12 |
300 |
1,50 |
1,50 |
0,476 |
32,47 |
|
60 |
4,00 |
5,00 |
2,388 |
22,13 |
400 |
1,20 |
1,50 |
0,355 |
34,90 |
|
70 |
4,00 |
5,00 |
2,043 |
21,76 |
500 |
2,30 |
1,50 |
0,283 |
37,02 |
|
80 |
4,00 |
5,00 |
1,785 |
20,93 |
600 |
2,00 |
1,50 |
0,236 |
38,35 |
|
90 |
4,00 |
5,00 |
1,585 |
21,49 |
700 |
1,70 |
1,50 |
0,201 |
39,59 |
|
100 |
4,00 |
5,00 |
1,425 |
22,97 |
800 |
1,50 |
1,50 |
0,176 |
40,91 |
|
120 |
4,00 |
5,00 |
1,185 |
25,16 |
900 |
1,30 |
1,50 |
0,156 |
41,84 |
|
140 |
2,00 |
5,00 |
1,013 |
27,20 |
1 000 |
1,20 |
1,50 |
0,140 |
42,71 |
Đối với trở kháng ZAB và ZCD, Bảng 2 qui định VSWR lớn nhất là 1,10. Trong ví dụ bằng số hiện tại, điều này có nghĩa là cả hai trở kháng này có một quỹ đạo (tâm tại p = 100 + j0 W, bán kính Dp = 9,5 W) là một đường biên trên mặt phẳng trở kháng. Nghiên cứu cho thấy chỉ thực hiện việc tính toán đối với p = (100 ± Dp + j0) và p = (100 ± jDp) là đủ. Kết quả tính toán được cho trong cột 7 và 8. Chú ý là giá trị DSAc cho trong Bảng C.2 cột 7 và 8 chỉ bằng nhau khi hr = ht.
DSAc liên quan với La, Ab và Fb chỉ có thể đánh giá được thông qua kỹ thuật số, như đề cập ở điều C.2.
Bằng cách sử dụng kỹ thuật này, người ta thấy rằng DSAc (La) < 0,03="" db="" và="">DSAc (Ab, Fb) < 0,03="">
Cột 9 của Bảng C.2, đưa
ra giá trị căn bậc hai của tổng (RSS) DSAS = Ö [S{DSA(i)}] sáu giá trị DSAc ở các cột trước. Các
giá trị có độ tin cậy 95 % ở cột 10 được suy ra từ việc nhân dữ liệu ở cột 9
với 2/ ![]() (xem công thức (C.17)). Các giá trị DSAt với độ tin cậy 95 % được
tính từ:
(xem công thức (C.17)). Các giá trị DSAt với độ tin cậy 95 % được
tính từ:

Giả sử DSAc(La) = 0,03 dB và DSAc(Ab, Fb) = 0,03 dB, thì tính được các giá trị DSAt trong cột 11. Trong ví dụ này, giá trị lớn nhất bằng DSAt = 0,19 dB (ở 80 MHz). Đó là lý do vì sao giá trị DSAt = 0,20 dB được đề cập ở 4.5.3.1.
Bảng C.2 - Ví dụ bằng số, tính SAt (xem C.1.3.2)
|
Tần số MHz |
SAc dB |
∆hr ∆SAc dB |
∆ht ∆SAc dB |
∆d ∆SAc dB |
∆f ∆SAc dB |
∆ZAB ∆SAc dB |
∆ZCD ∆SAc dB |
RSS ∆SA∑ dB |
95 % ∆SA∑ dB |
95 % ∆SAt dB |
|
30 |
21,03 |
0,023 |
0,018 |
0,056 |
0,031 |
0,110 |
0,026 |
0,13 |
0,15 |
0,16 |
|
35 |
20,95 |
0,028 |
0,020 |
0,051 |
0,007 |
0,080 |
0,057 |
0,12 |
0,13 |
0,14 |
|
40 |
20,60 |
0,025 |
0,024 |
0,054 |
0,005 |
0,059 |
0,105 |
0,14 |
0,16 |
0,16 |
|
45 |
20,70 |
0,013 |
0,028 |
0,055 |
0,013 |
0,036 |
0,121 |
0,14 |
0,16 |
0,17 |
|
50 |
21,12 |
0,001 |
0,033 |
0,048 |
0,016 |
0,010 |
0,106 |
0,12 |
0,14 |
0,15 |
|
60 |
22,13 |
0,002 |
0,044 |
0,051 |
0,005 |
0,027 |
0,049 |
0,09 |
0,10 |
0,11 |
|
70 |
21,76 |
0,019 |
0,050 |
0,050 |
0,038 |
0,061 |
0,058 |
0,12 |
0,14 |
0,14 |
|
80 |
20,93 |
0,014 |
0,041 |
0,038 |
0,039 |
0,104 |
0,098 |
0,16 |
0,18 |
0,19 |
|
90 |
21,49 |
0,011 |
0,012 |
0,035 |
0,011 |
0,121 |
0,084 |
0,15 |
0,18 |
0,18 |
|
100 |
22,97 |
0,007 |
0,021 |
0,036 |
0,027 |
0,106 |
0,056 |
0,13 |
0,15 |
0,15 |
|
120 |
25,16 |
0,008 |
0,039 |
0,012 |
0,018 |
0,051 |
0,092 |
0,12 |
0,13 |
0,14 |
|
140 |
27,20 |
0,043 |
0,043 |
0,047 |
0,029 |
0,055 |
0,055 |
0,11 |
0,13 |
0,14 |
|
160 |
26,44 |
0,030 |
0,032 |
0,046 |
0,023 |
0,097 |
0,097 |
0,15 |
0,18 |
0,18 |
|
180 |
27,52 |
0,021 |
0,021 |
0,039 |
0,029 |
0,086 |
0,086 |
0,13 |
0,16 |
0,16 |
|
200 |
29,37 |
0,015 |
0,015 |
0,029 |
0,017 |
0,057 |
0,057 |
0,09 |
0,10 |
0,11 |
|
250 |
30,43 |
0,035 |
0,019 |
0,038 |
0,027 |
0,089 |
0,072 |
0,13 |
0,15 |
0,15 |
|
300 |
32,47 |
0,010 |
0,008 |
0,016 |
0,020 |
0,075 |
0,076 |
0,11 |
0,13 |
0,13 |
|
400 |
34,90 |
0,042 |
0,054 |
0,008 |
0,016 |
0,084 |
0,092 |
0,14 |
0,16 |
0,17 |
|
500 |
37,02 |
0,005 |
0,006 |
0,047 |
0,009 |
0,068 |
0,069 |
0,11 |
0,12 |
0,13 |
|
600 |
38,35 |
0,000 |
0,004 |
0,013 |
0,012 |
0,075 |
0,075 |
0,11 |
0,12 |
0,13 |
|
700 |
39,59 |
0,002 |
0,046 |
0,017 |
0,008 |
0,080 |
0,072 |
0,12 |
0,14 |
0,14 |
|
800 |
40,91 |
0,004 |
0,051 |
0,008 |
0,009 |
0,071 |
0,075 |
0,12 |
0,13 |
0,14 |
|
900 |
41,84 |
0,005 |
0,018 |
0,025 |
0,009 |
0,075 |
0,068 |
0,11 |
0,12 |
0,13 |
|
1 000 |
42,71 |
0,011 |
0,062 |
0,004 |
0,010 |
0,079 |
0,075 |
0,13 |
0,15 |
0,15 |
|
∆SA (dB) lớn nhất |
0,043 |
0,062 |
0,056 |
0,039 |
0,121 |
0,121 |
0,16 |
0,18 |
0,19 |
|
|
Chú thích: Dòng cuối cùng của bảng này đưa ra giá trị lớn nhất trong mỗi cột. Ba chữ số sau dấu phẩy ở các cột từ 3 đến 8 không có ý nghĩa thực tế và chỉ được đưa ra để so sánh các kết quả tính được. |
||||||||||
C.1.3.3 Tính hrc và Dhrt (Bảng C.3)
Điều này xét hr,max(fs) như qui định ở 4.4.3.2 a) và 4.4.5. Giá trị có thể tính được bằng qui trình tìm đỉnh cực đại thứ nhất trong SA với hr > 1 m. Cần chú ý rằng đỉnh cực đại tìm được, nghĩa là cực đại liên quan đến việc loại bỏ sóng trực tiếp và gián tiếp tại anten thu. Các kết quả hrc (xem 4.5.3.2) tại tần số fs qui định ở 4.4.3.2 a) được cho trong Bảng C.3.
Bảng C.3 cũng đưa ra các kết quả tính toán độ không đảm bảo đo, đưa ra Dhr,max, tương tự với các giá trị cho trong C.1.3.2, sử dụng dung sai cho trong Bảng 2. Trong trường hợp hr,max, chỉ có các dung sai Dht, Dd và Df đóng vai trò đáng kể. Giá trị Dhrt lớn nhất (độ tin cậy = 95 %) tìm được là 0,02 m. Đây là lý do vì sao giá trị 0,025 được đề cập ở 4.5.2.5.
Bảng C.3 - Ví dụ bằng số, tính hrc và Dhrt (xem C.1.3.3)
|
Tần số MHz 4.4.3.2 a) |
hrc m |
∆ht ∆hrc m |
∆d ∆hrc m |
∆f ∆hrc m |
RSS ∆hrc∑ m |
95 % ∆hr, t m |
|
300 |
2,630 |
0,014 |
0,010 |
0,004 |
0,017 |
0,020 |
|
600 |
1,284 |
0,006 |
0,005 |
0,005 |
0,010 |
0,011 |
|
900 |
1,723 |
0,008 |
0,009 |
0,002 |
0,013 |
0,015 |
|
Lớn nhất |
− |
0,014 |
0,010 |
0,005 |
0,017 |
0,020 |
C.1.3.4 Tính fc và Dft (Bảng C.4)
Điều này xét fmax(hr, fs) như qui định ở 4.4.3.2 b) và 4.4.6. Giá trị có thể tính được bằng qui trình tìm cực đại trong SA với phối hợp qui định {hr, fs}. Cần chú ý rằng đỉnh cực đại tìm được, nghĩa là cực đại liên quan đến việc loại bỏ sóng trực tiếp và gián tiếp tại anten thu. Các kết quả fc (xem 4.5.3.3) ở các phối hợp qui định ở 4.4.3.2 b) được cho trong Bảng C.4.
Bảng C.4 - Ví dụ bằng số, tính fc và Dft (xem C.1.3.4)
|
Tần số/độ cao MHz/m 4.4.3.2 b) |
fc MHz |
∆hr ∆fc/fc |
∆ht ∆fc/fc |
∆d ∆fc/fc |
RSS ∆hc∑/fc |
95 % ∆ft /fc |
|
300/2,65 |
297,4 |
0,004 |
0,006 |
0,005 |
0,009 |
0,010 |
|
600/1,30 |
592,6 |
0,008 |
0,005 |
0,004 |
0,010 |
0,012 |
|
900/1,70 |
912,1 |
0,006 |
0,005 |
0,004 |
0,009 |
0,010 |
|
Lớn nhất |
− |
0,008 |
0,006 |
0,005 |
0,010 |
0,012 |
Bảng C.4 cũng đưa ra các kết quả tính toán độ không đảm bảo đo, đưa ra Dft/fc, tương tự với các giá trị cho trong C.1.3.2, sử dụng dung sai cho trong Bảng 2. Trong trường hợp fmax, chỉ có các dung sai Dhr, Dht và Dd đóng vai trò đáng kể. Giá trị Dft lớn nhất (độ tin cậy = 95 %) tìm được là 0,012 fc. Đây là lý do vì sao giá trị 0,015 fc được đề cập ở 4.5.2.7.
C.2 Tính toán bằng số
Điều này đưa ra phương pháp thay thế để tính trở kháng của anten, tổng chiều dài anten và độ suy giảm vị trí nhỏ nhất. Phương pháp này sử dụng chương trình máy tính có sẵn trên thị trường dựa trên phương pháp chương trình mômen có thể thao tác trên máy tính cá nhân. Ví dụ về chương trình này là MININEC [C.6, C.7]. Phương pháp này không giả định phân bố dòng điện hình sin trên anten dây.
Trong chương trình, anten được đại diện bởi các dây thẳng được chia ra thành các đoạn để phân tích. Nhằm thu được kết quả chính xác, điều quan trọng là các đoạn không được quá dài hoặc quá ngắn so với bước sóng và chiều dài mỗi đoạn lớn hơn đường kính của nó. Khoảng 30 đoạn trên một nửa bước sóng sẽ đưa ra kết quả tốt.
Để kiểm tra sự thích hợp của phân đoạn được chọn, người ta có thể kiểm tra sự hội tụ của trở kháng và dòng điện tính được khi số đoạn tăng lên. Chương trình cho phép đưa vào mô hình một mặt phẳng đất vô hạn, dẫn điện hoàn hảo. Chương trình cũng cho phép điện áp cần đặt tại một điểm trên dây và trở kháng tải tập trung cần nối tại một điểm trên dây.
C.2.1 Trở kháng vào của anten
Trở kháng vào của anten, Za, tại điểm cung cấp có thể đọc từ đầu ra chương trình.
C.2.2 Tổng chiều dài của anten thử nghiệm
Chiều dài của anten được chọn sao cho anten cộng hưởng (nghĩa là có điện kháng vào bằng “không”) trong không gian tự do. Chiều dài được chọn lặp lại. Bắt đầu với chiều dài anten bằng một nửa bước sóng, chạy chương trình để xác định điện kháng vào. Nếu điện kháng vào dương, thì giảm chiều dài của anten, còn nếu điện kháng vào âm thì tăng chiều dài của anten lên. Chương trình tiếp tục chạy với chiều dài anten mới để xác định điện kháng vào mới của anten.
Quá trình thay đổi chiều dài anten và tính toán kết quả điện kháng vào của anten được lặp lại cho đến khi môđun của điện kháng vào nhỏ hơn 1W. Lúc này anten có chiều dài thích hợp.
C.2.3 Độ suy giảm vị trí lý thuyết
Cách bố trí để thiết lập phương pháp chương trình mômen bao gồm hai dây phía trên mặt phẳng đất vô hạn, dẫn điện hoàn toàn. Hai dây này có độ cao đúng và tách biệt. Dây đại diện cho anten phát được cấp điện áp Uf = 1 + j0 V tại điểm giữa của nó và dây đại điện cho anten thu mang tải với trở kháng bằng ZCD (trở kháng vào của tầng kết hợp bộ biến đổi cân bằng-không cân bằng và cáp của anten thu và máy thu, xem Hình C.2). Các tham số cần quan tâm ở đầu ra chương trình là trở kháng vào của anten phát và biên độ của dòng điện tải.
Lúc này, độ suy giảm vị trí được cho bởi công thức sau:

trong đó
I2 là dòng điện tải (xem Hình C.2);
Za là trở kháng vào của anten phát (xem C.2.1);
ZAB là trở kháng vào của tầng có lắp bộ biến đổi cân bằng-không cân bằng và cáp của anten phát và máy phát tín hiệu; và
ZCD là trở kháng vào của tầng có lắp bộ biến đổi cân bằng-không cân bằng và cáp của anten thu và máy thu (xem Hình C.2).
Công thức trên đưa ra độ suy giảm vị trí nhỏ nhất thích hợp nếu các đầu bộ biến đổi cân bằng-không cân bằng được nối với nhau. Nếu, thay vào đó, cáp từ máy phát tín hiệu và máy thu được nối với nhau, thì khi đó các tham số S của bộ biến đổi cân bằng-không cân bằng đo được cũng đưa vào tính toán độ suy giảm vị trí.
C.3 Tài liệu tham khảo
[C.1] Mô hình cao tần trong nghiên cứu anten, Brown & King, Biên bản lưu IRE, tập 22, số 4, trang 457-480, Tháng tư, 1934.
[C.2] Lý thuyết anten, Phân tích và thiết kế, Balanis C.A., Harper & Row, Mục 7.3.2, New York, 1982. (Các loại sách giáo khoa về lý thuyết anten khác có thể còn cung cấp biểu thức đối với trở kháng của anten).
[C.3] Sổ tay hàm số toán học, Abramowitz M. và Stegun I.A., Dover, Mục 5.2, New York, 1972.
[C.4] Công thức của độ suy giảm vị trí tiêu chuẩn về mặt trở kháng anten, Sigiura A., Văn kiện hội nghị IEEE về EMC, EMC-32, 4, trang 257-263, 1990.
[C.5] Chú thích kỹ thuật NIST 1297, Hướng dẫn đánh giá và biểu diễn độ thay đổi của các kết quả phép đo NIST, Xuất bản năm 1994.
[C.6] Hệ thống MININEC: Phân tích anten dây bằng máy vi tính, Rockway J.W., Logan J.C., Daniel W.S.T. và Li S.T., Artech House, Luân đôn, 1988.
[C.7] Độ không đảm bảo đo thấp trong dải tần từ 30 MHz đến 1 GHz sử dụng anten lưỡng cực tiêu chuẩn đếm được và mặt phẳng đất chuẩn quốc gia, Alexander M.J. và Salter M.J., Biên bản lưu IEE Khoa học kỹ thuật đo lường, tập 143, số 4, tháng bảy, 1996.
Phụ lục D
(tham khảo)
Ứng dụng của lưỡng cực có chiều dài cố định (30 MHz £ f £ 80 MHz)
Đang xem xét (xem thêm 4.3.2.2).
Phụ lục E
(tham khảo)
Chương trình Pascal sử dụng ở C.1.3
Mục đích của phụ lục này là làm cho các phép tính cần thiết dễ dàng tiếp cận. Chương trình Pascal dưới đây (Turbo Pascal 7.0) được dùng để tính các kết quả cho trong C.1.3. Không cần cố gắng để tối ưu hóa chương trình này.
Chương trình này tuân thủ chặt chẽ các công thức cho trong điều C.1, do đó có thể dễ dàng kiểm tra. Phần {chú giải} ở cuối Qui trình (PROCEDURE) đề cập đến (các) công thức tương ứng. “Chương trình thực”, sau phần {tính toán}, chỉ gồm hai dòng, trong đó tính La và SAc được tính. Trước phần này là phần {dữ liệu đầu vào} và tiếp theo nó là phần {dữ liệu đầu ra}. Hai phần dữ liệu đầu vào và dữ liệu đầu ra có thể dễ dàng lắp vào phép tính thực cần tiến hành.
PROGRAM analytical_calculation_SA_OATS;
USES crt,dos;
LABEL impedance, calculate;
VAR f,f0,laf,la0,wr,ht,hr,d,rab,xab,rcd,xcd,saf,arc,fir: real; yn : char;
PROCEDURE cprod(r1,i1,r2,i2:real; var rz,iz:real);
begin
rz:= r1 *r2-i1*i2; iz:= i1*r2+r1*i2;
end; {cprod, tích tổ hợp}
PROCEDURE fsc(x:real; var fx: real); var a1,a2,b1,b2,nom,denom:real; begin
a1:= 7.241163; a2:= 2.463936; b1 := 9.068580; b2:= 7.157433;
nom:= x*x*x*x+a1*x*x+a2; denom:= x*x*x*x+b1 *x*x+b2; fx:= nom/denom/x;
end; {fsc, công thức (C.5c)}
PROCEDURE gsc(x:real; var gx: real); var c1 ,c2,d1,d2,nom,denom:real; begin
c1:= 7.547478; c2:= 1.564072;
d1:=12.723684; d2:=15.723606; nom:=x*x*x*x+c1*x*x+c2; denom:= x*x*x*x+d1 *x*x+d2; gx:= nom/denom/x/x;
end; {gsc, công thức (C.5c)}
PROCEDURE Si(x:real; var six:real);
var fx,gx:real;
begin
if x>=1 then begin
fsc(x,fx); gsc(x,gx); six:= Pi/2-fx*cos(x)-gx*sin(x);
end;
If x<1>then
six:= x-x*x*x/18+x*x*x*x*x/600-x*x*x*x*x*x*x/35280;
end; {Si, công thức (C.5a)}
PROCEDURE Ci(x:real; var cix:real);
var fx,gx,sum: real;
begin
if x>=1 then begin
fsc(x,fx); gsc(x,gx); cix:= fx*sin(x)-gx*cos(x);
end;
if x<1>then
cix:=0.577+ln(x)-x*x/4+x*x*x*x/96-x*x*x*x*x*x/4320+x*x*x*x*x*x*x*x/322560;
end; {Ci, công thức (C.5b)}
PROCEDURE Ra(f,laf:real; var raf:real);
var kx0,g,k,x,cix,ci2x,six,si2x,ssi,sci:real;
begin
kx0:= 377/2/Pi; g:= 0.577; k:= 2*Pi*f/3E8;
Si(k*laf,six); Ci(k*laf,cix);
Si(2*k*laf,si2x); Ci(2*k*laf,ci2x);
ssi:= si2x-2*six; sci:= g+ln(k*laf/2)+ci2x-2*cix;
x:= k*laf;
raf:= kx0*(g+ln(x)-cix+sin(x)*ssi/2+cos(x)*sci/2)/sin(x/2)/sin(x/2);
end; {Ra, không gian tự do, công thức (C.13)}
PROCEDURE Xa(f,laf,wr:real; var xaf:real);
var kx0,k,x,cix,ci2x,cixa,six,si2x,ssi,sci:real;
begin
kx0:= 377/4/Pi; k:= 2*Pi*f/3E8;
Si(k*laf,six); Ci(k*laf,cix);
Si(2*k*laf ,si2x); Ci(2*k1*laf ,ci2x);
Ci(2*k*wr*wr/laf ,cixa);
ssi:= 2*six+cos(k*laf)*(2*six-si2x);
sci:= sin(k*laf)*(2*cix-ci2x-cixa);
x:= k*laf/2;
xaf:= kx0*(ssi-sci)/sin(x)/sin(x);
end; {Xa, công thức (C.3)}
PROCEDURE la(f,wr:real; var laf:real);
label again;
var del,lat,lao,xat:real;
begin
del:= 0.1; lat:= 3E8/f/2; lao:= lat;
again: Xa(f,lat,wr,xat); lat:= lat-del*lat;
if xat>0 then begin lao:=lat; goto again; end;
lat:= lao+ 1.1 *del*lao; Xa(f,lat,wr,xat);
if abs(xat)>0.00001 then begin del:= del/10; goto again; end;
laf:= lat;
end; {la, chiều dài anten (f), công thức (C.2)}
PROCEDURE Rm(r,f,laf,s1,s2,s3,s4:real; var rmf:real);
var k,fac,kcr,kc1,kc2,kc3,kc4,ks1,ks2,ks3,ks4,t1,t2,t3:real;
begin
k:= 2*Pi*f/3E8; fac:= 377/4/Pi/sin(k*laf/2)/sin(k*laf/2); Ci(k*r,kcr);
Ci(k*s1,kc1); Ci(k*s2,kc2); Ci(k*s3,kc3); Ci(k*s4,kc4);
Si(k*s1,ks1); Si(k*s2,ks2); Si(k*s3,ks3); Si(k*s4,ks4);
t1:= 2*(2*kcr-kc3-kc4);
t2:= cos(k*laf)*(2*kcr+kc1+kc2-2*kc3-2*kc4);
t3:= sin(k*laf)*(ks1-ks2-2*ks3+2*ks4);
rmf:= fac*(t1+t2+t3);
end; {R-chung, công thức (C.14)}
PROCEDURE Xm(r,f,laf,s1 ,s2,s3,s4:real; var xmf:real);
var k,fac,ksr,kc1,kc2,kc3,kc4,ks1,ks2,ks3,ks4,t1,t2,t3:real;
begin
k:= 2*Pi*f/3E8; fac:=377/4/Pi/sin(k*laf/2)/sin(k*laf/2); Si(k*r,ksr);
Si(k*s1 ,ks1); Si(k*s2,ks2); Si(k*s3,ks3); Si(k*s4,ks4);
Ci(k*s1 ,kc1); Ci(k*s2,kc2); Ci(k*s3,kc3); Ci(k*s4,kc4);
t1:= 2*(2*ksr-ks3-ks4);
t2:= cos(k*laf)*(2*ksr+ks1 +ks2-2*ks3-2*ks4);
t3:= sin(k*laf)*(kc1-kc2-2*kc3+2*kc4); xmf:= -fac*(t1 +t2-t3);
end; {X-chung, công thức (C.15)}
PROCEDURE Dist(r,laf:real; var s1,s2,s3,s4:real);
var sqr1,sqr2:real;
begin
sqr1:= sqrt(r*r+laf*laf); sqr2:= sqrt(r*r+laf*laf/4);
s1 := sqr1 +Iaf; s2:= sqr1-laf;
s3:= sqr2+laf/2; s4:= sqr2-laf/2;
end;
{Khoảng cách, công thức (C.16)}
PROCEDURE SA(f,f0,d,ht,hr,arc,fir,rab,xab,rcd,xcd:real; var saf:real);
var r,r11,x11,r12,x12,r13,x13,r14,x14,r22,x22,r24,x24,rrc,irc, rd,xd,rna,xna,rnb,xnb,rn,xn,s1,s2,s3,s4,wr0,la0,alpha :real;
begin
rrc:= arc*cos(fir); irc:= arc*sin(fir);
alpha:= 40; wr0:= 1.5E8/f0/sqrt(exp(alpha));
la(f0,wr0,la0);
Ra(f,la0,r11);
Xa(f,la0,wr0,x11);
r22:= r11;
x22:= x11;
r:= sqrt(d*d+(ht-hr)*(ht-hr));
Dist(r,la0,s1,s2,s3,s4);
Rm(r,f,la0,s1 ,s2,s3,s4,r12);
Xm(r,f,la0,s1 ,s2,s3,s4,x12);
r:= 2*ht; Dist(r,la0,s1,s2,s3,s4);
Rm(r,f ,la0,s1 ,s2,s3,s4,rd);
Xm(r,f ,la0,s1 ,s2,s3,s4,xd);
cprod(rrc,irc,rd,xd,r13,x13);
r:= sqrt(d*d+(ht+hr)*(ht+hr));
Dist(r,la0,s1 ,s2,s3,s4);
Rm(r,f,la0,s1 ,s2,s3,s4,rd);
Xm(r,f,la0,s1 ,s2,s3,s4,xd);
cprod(rrc,irc,rd,xd,r14,x14);
r:= 2*hr; Dist(r,la0,s1,s2,s3,s4);
Rm(r,f,la0,s1 ,s2,s3,s4,rd);
Xm(r,f,la0,s1 ,s2,s3,s4,xd);
cprod( rrc,irc, rd,xd, r24,x24);
cprod(r12+r14,x12+x14,rab+rcd,xab+xcd,rd,xd);
cprod(rab+r11 +r13,xab+x11 +x13,rcd+r22+r24,xcd+x22+x24,rna,xna);
cprod(r12+r14,x12+x14,r12+r14,x12+x14,rnb,xnb);
rn:= rna-rnb; xn:= xna-xnb;
saf:= sqrt((rn*rn+xn*xn)/(rd*rd+xd*xd));
saf:= 20*ln(saf)/ln(10);
end; (SA, Công thức (C.6) và (C.12)}
PROCEDURE YesNo(var rk: char);
begin
repeat
rk:= readkey; rk:= upcase(rk);
until (rk= 'Y') or (rk= 'N'); writeln(rk);
end; {Yes/No}
BEGIN
{Dữ liệu đầu vào}
clrscr;
write('Tần số (MHz)= '); read(f ); f:= f*1E6;
write('Bán kính anten dây (mm)= '); read(wr); wr:= wr*1E-3;
write('độ cao anten phát (m)= ‘); read(ht );
write('độ cao anten thu (m)= '); read(hr );
write('khoảng cách anten theo chiều ngang (m)= '); read(d );
write('mặt phẳng phản xạ lý tưởng? (Y/N)= '); YesNo(yn);
if yn='Y' then begin arc:=1; fir:= Pi; goto trở kháng; end;
write('Hệ số phản xạ từng phần= '); read(arc);
write('Hệ số phản xạ theo giai đoạn (độ)= '); read(fir); fir:= fir"Pi/180;
trở kháng:
write('Trở kháng anten lý tưởng (Y/N)= ‘); YesNo(yn);
if yn='Y' then begin rab:= 100; xab:= 0; rcd:= 100; xcd:= 0; goto tính; end;
write('R-AB (phát) (Ohm)= '); read(rab);
write('X-AB (phát) (Ohm)= '); read(xab);
write('R-CD (thu) (Ohm)= '); read(rcd);
write('X-CD (thu) (Ohm)= '); read(xcd);
{Tính toán}
Tính:
f0:=f
la(f0, wr, laf);
SA(f, f0,d, ht,hr ,arc, fir, rab,xab,rcd ,xcd ,saf);
{Dữ liệu đầu ra}
writeln; writeln('f(MHz)= ',f/1E6:3:0,' La(m)= ',laf:3:3,' SAc(dB)= ',saf:3:3);
writeln;
END.
Phụ lục F
(tham khảo)
Danh mục kiểm tra qui trình hiệu lực
Bảng F.1 - Hạng mục cần ghi trong báo cáo hiệu lực CALTS
|
Tham khảo 4.6.2 |
Hạng mục |
Ghi chú |
|
a |
Thông tin chung |
|
|
a1 |
Địa chỉ, vị trí CALTS |
|
|
a2 |
Địa chỉ, số điện thoại/fax của người sở hữu CALTS |
|
|
a3 |
Địa chỉ, số điện thoại/fax của người/tổ chức chịu trách nhiệm về báo cáo hiệu lực của CALTS |
Có thể giống như ở a2. |
|
a4 |
Địa chỉ, số điện thoại/fax của người/tổ chức tiến hành đánh giá hiệu lực của CALTS |
Có thể giống như ở a2 và/hoặc a3. |
|
a5 |
Chữ ký của người/tổ chức đề cập ở a2, a3 và a4 |
|
|
a6 |
Mô tả chung về cấu hình của CALTS và các linh kiện phụ trợ được sử dụng trong quá trình đánh giá hiệu lực CALTS. |
Sử dụng ảnh, hình vẽ và số lượng các bộ phận có thể dễ dàng mô tả |
|
a7 |
Ngày hoàn thành việc đánh giá hiệu lực CALTS và ngày ban hành báo cáo hiệu lực. |
|
|
b |
Đánh giá hiệu lực |
|
|
b1 |
Kết quả đánh giá hiệu lực. |
|
|
b2 |
Xác định chu kỳ hiệu lực của CALTS phê chuẩn hiện tại. |
|
|
b3 |
Nhận biết các điều kiện và cấu hình giới hạn |
|
|
c |
Anten thử nghiệm |
|
|
c1 |
Nhận biết anten đếm được |
Loại, số lượng các bộ phận |
|
c2 |
Kiểm tra sự phù hợp với các yêu cầu kỹ thuật qui định áp dụng được |
Tham khảo 4.3.2 và các giá trị ở Bảng 2. |
|
c3 |
Xác định trở kháng đặc trưng sử dụng. |
Xem 4.3.2.7. |
|
d |
Bố trí thử nghiệm |
|
|
d1 |
Mô tả chi tiết về cơ cấu thử nghiệm. |
|
|
d2 |
Kiểm tra sự phù hợp với các yêu cầu kỹ thuật qui định áp dụng được. |
Tham khảo 4.4.2 và các giá trị ở Bảng 2. |
|
e |
Phép đo |
|
|
e1 |
Nếu ứng dụng đưa ra cơ sở đối với sai lệch so với các tần số qui định. |
Xem 4.4.3.3. |
|
e2 |
Kết quả phép đo SA i.a.w. 4.4.4 và Bảng 1 và xác định độ không đảm bảo đo SA. |
Xem 4.4.3.1 và 4.4.4. |
|
e3 |
Kết quả của phép đo quét độ cao anten hoặc phép đo quét tần số và độ thay đổi. |
Xem 4.4.3.2, và 4.4.5 hoặc 4.4.6. |
|
f |
Tính độ suy giảm vị trí và dung sai |
Xem 4.5.2. |
|
f1 |
Mô tả phương pháp tính sử dụng đối với SA và tiêu chí độ cao hoặc tần số đối với SA lớn nhất. |
Tham khảo: Phụ lục C hoặc qui trình bằng số. |
|
f2 |
Xác định SA lý thuyết và tiêu chí độ cao hoặc tần số. |
|
|
f3 |
Xác định độ không đảm bảo đo tổng sử dụng giá trị đặt hoặc giá trị tính được trong trường hợp các sai lệch ở Bảng 2. |
Công thức (3) và (4) hoặc (5). |
|
g |
Tính toán tiêu chí phù hợp |
Xem 4.5.3. |
|
g1 |
Xác định giá trị tuyệt đối của giá trị SA tính được và đo được và độ cao hoặc tần số của anten. |
|
|
g2 |
Xác định sự khác nhau giữa dung sai cho phép và độ không đảm bảo đo của SA và độ cao hoặc tần số của anten. |
|
|
g3 |
Kiểm tra sự phù hợp sử dụng công thức (6) và (7) hoặc (8). |
|
|
h |
Kết luận cuối cùng về sự phù hợp |
|
|
h1 |
Tóm tắt kết quả, tuyên bố sự phù hợp có tính đến chu kỳ hiệu lực và các điều kiện và cấu hình giới hạn đã nêu. |
Tham khảo b. |
MỤC LỤC
Lời nói đầu
Lời giới thiệu
1 Phạm vi áp dụng
2 Tài liệu viện dẫn
3 Định nghĩa
4 Yêu cầu kỹ thuật và qui trình đánh giá hiệu lực đối với vị trí thử nghiệm cần sử dụng để hiệu chuẩn anten trong dải tần từ 30 MHz đến 1 000 MHz
4.1 Lời giới thiệu
4.2 Yêu cầu kỹ thuật đối với vị trí thử nghiệm hiệu chuẩn anten (CALTS)
4.3 Yêu cầu kỹ thuật về anten thử nghiệm
4.4 Qui trình đánh giá hiệu lực vị trí thử nghiệm hiệu chuẩn anten
4.5 Tiêu chí về sự phù hợp của vị trí thử nghiệm hiệu chuẩn anten
4.6 Báo cáo hiệu lực 4.7 Hiệu lực của CALTS đối với phân cực thẳng đứng
Phụ lục A - Yêu cầu về CALTS
Phụ lục B - Xem xét anten thử nghiệm
Phụ lục C - Lý thuyết về anten và độ suy giảm vị trí
Phụ lục D - Ứng dụng của lưỡng cực có chiều dài cố định (30 MHz £ f £ 80 MHz)
Phụ lục E - Chương trình pascal sử dụng ở C.1.3
Phụ lục G - Danh mục kiểm tra qui trình hiệu lực
* Tham khảo đặt trong ngoặc vuông liên quan đến tài liệu tham khảo ở điều A.4.
* Các tham khảo đặt trong ngoặc vuông liên quan đến các tài liệu tham khảo cho trong điều B.3.
* Các tham khảo đặt trong ngoặc vuông liên quan đến các tài liệu tham khảo cho trong điều C3.